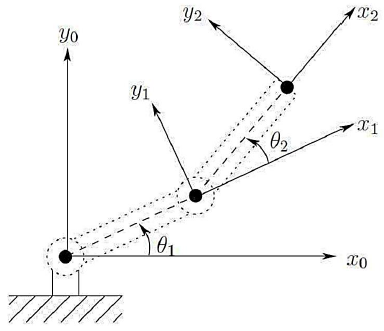
Considere um robô planar composto por dois elos e dois eixos rotacionais, operando no plano XY, conforme o desenho abaixo:
Na representação de Denavit–Hartenberg, os parâmetros para cada link são definidos pelos quatro valores:
- ai: comprimento do elo (distância entre os eixos zi e zi+1 medidos ao longo do eixo xi).
- \( \alpha_i \): ângulo entre os eixos zi e zi+1 medido em torno de xi.
- di: deslocamento ao longo do eixo zi.
- \( \theta_i \): ângulo de rotação em torno do eixo zi.
Para um robô planar com dois graus de liberdade, onde os eixos são rotacionais e os elos operam no plano (portanto, sem deslizamento no eixo z), a representação clássica, que apresenta corretamente os parâmetros de Denavit–Hartenberg para esse robô planar, está apresentada na alternativa:
Provas
Questão presente nas seguintes provas