Foram encontradas 40 questões.
I. O sistema de manufatura just in time (JIT) é uma abordagem que visa reduzir os estoques ao mínimo possível, produzindo e entregando os produtos apenas quando são necessários, o que pode levar a uma redução nos custos de armazenamento e maior flexibilidade na produção.
II. A automação de processos em sistemas de manufatura com o uso de controladores lógicos programáveis (CLPs) é a execução de comandos simples, não sendo capaz de gerenciar sistemas mais complexos de controle de produção.
III. A manufatura aditiva, como a impressão 3D, tem ganhado popularidade por permitir a produção de peças com geometrias complexas e personalizadas, sendo altamente eficaz para protótipos e pequenas produções em lotes.
IV. O planejamento de necessidades de materiais (MRP) é um sistema que busca gerenciar os estoques e o fluxo de materiais na produção, mas não leva em consideração os prazos de entrega e as variações na demanda do mercado.
Quais estão corretas?
Provas
I. O controle de um sistema robotizado pode ser realizado por diferentes tipos de controladores, como o PID (Proporcional-Integral-Derivativo) ou o controle adaptativo, dependendo da complexidade da tarefa.
II. A cinemática de um robô industrial, ao descrever seu movimento, envolve apenas o cálculo da posição final com base em variáveis como ângulos de juntas e deslocamentos lineares.
III. A implementação de sistemas robotizados em ambientes dinâmicos, como fábricas com múltiplos robôs operando simultaneamente, requer algoritmos avançados de planejamento e controle para evitar colisões e otimizar a eficiência da tarefa.
IV. O sensoriamento de um robô, através de sensores como câmeras e sensores de proximidade, não impacta de forma significativa a capacidade de percepção e tomada de decisão do robô, visto que sua programação é estática.
Quais estão corretas?
Provas
Provas
Provas
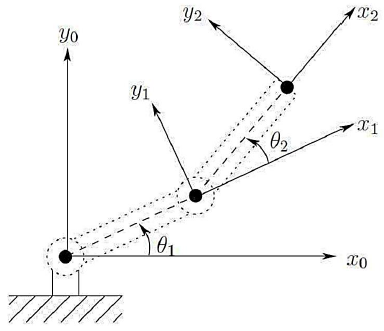
Considere um robô planar de dois graus de liberdade, composto por dois elos de comprimentos L1 = 2 e L2 = 2. O desenho simplificado do robô é ilustrado abaixo:
Para que o órgão terminal (end effector) atinja a posição (2,2) no plano XY, determine qual conjunto de ângulos (em graus) corresponde à solução da cinemática inversa, considerando a configuração de "cotovelo para baixo".
Provas
Provas
Provas
Considere a seguinte tabela de parâmetros de Denavit–Hartenberg para um robô com seis graus de liberdade e punho esférico:
| i | ai | \( \alpha_1 \) | di | \( \theta_i \) |
| 1 | 0 | -90º | d1 | \( \theta_1 \) |
| 2 | L2 | 0º | 0 | \( \theta_2 \) |
| 3 | L3 | -90º | 0 | \( \theta_3 \) |
| 4 | 0 | 90º | d4 | \( \theta_4 \) |
| 5 | 0 | -90º | 0 | \( \theta_5 \) |
| 6 | 0 | 0º | d6 | \( \theta_6 \) |
Com base na tabela acima, assinale a alternativa que melhor interpreta a configuração do punho esférico do robô.
Provas
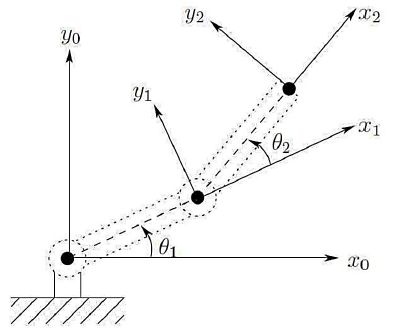
Considere um robô planar composto por dois elos e dois eixos rotacionais, operando no plano XY, conforme o desenho abaixo:
Na representação de Denavit–Hartenberg, os parâmetros para cada link são definidos pelos quatro valores:
- ai: comprimento do elo (distância entre os eixos zi e zi+1 medidos ao longo do eixo xi).
- \( \alpha_i \): ângulo entre os eixos zi e zi+1 medido em torno de xi.
- di: deslocamento ao longo do eixo zi.
- \( \theta_i \): ângulo de rotação em torno do eixo zi.
Para um robô planar com dois graus de liberdade, onde os eixos são rotacionais e os elos operam no plano (portanto, sem deslizamento no eixo z), a representação clássica, que apresenta corretamente os parâmetros de Denavit–Hartenberg para esse robô planar, está apresentada na alternativa:
Provas
Provas
Caderno Container