Considere um robô planar de dois graus de liberdade, composto por dois elos de comprimentos L1 = 2 e L2 = 2. O desenho simplificado do robô é ilustrado abaixo:
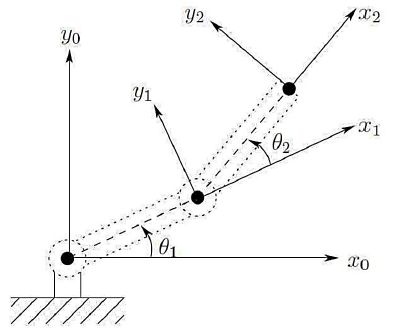
Para que o órgão terminal (end effector) atinja a posição (2,2) no plano XY, determine qual conjunto de ângulos (em graus) corresponde à solução da cinemática inversa, considerando a configuração de "cotovelo para baixo".
Provas
Questão presente nas seguintes provas