Foram encontradas 450 questões.
No processo de usinagem, o movimento que origina a saída de cavaco ao longo de todo o
corpo da peça a ser usinada durante várias revoluções ou curso da ferramenta de corte é
denominado
Provas
Questão presente nas seguintes provas
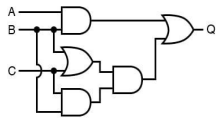
Todo circuito lógico possui sua expressão booleana, que pode ser obtida através do
circuito ou pela tabela-verdade do problema. A expressão booleana ainda pode ser reduzida a
um menor número de termos e variáveis. Isso é feito através de técnicas de simplificação de
circuitos lógicos. Marque a alternativa que apresenta um circuito com um menor número de
portas, equivalente ao representado na figura a seguir:
Provas
Questão presente nas seguintes provas
Os circuitos podem ser descritos por meio de variáveis e funções que assumem os valores
0 e 1. É possível descrever essas variáveis e funções por meio de tabelas, denominadas de
tabelas-verdades. Uma tabela-verdade é um método para descrever como a saída de um
circuito lógico depende dos níveis lógicos das entradas do circuito. Como os valores podem ser
apenas 0 ou 1, é possível mapear todas as combinações de entradas e definir uma saída para
cada uma delas. Analise a tabela-verdade da variável S que está em função de três variáveis A,
B e C.
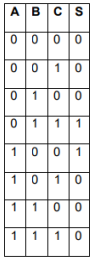
É CORRETO afirmar que a expressão que descreve a função S é:
É CORRETO afirmar que a expressão que descreve a função S é:
Provas
Questão presente nas seguintes provas
Nos sistemas geodésicos citados a seguir, quais são geocêntricos?
Provas
Questão presente nas seguintes provas
Considerando que os pontos A, B, K e M são pontos de referência conhecidos, qual é o máximo de direções que são observadas na poligonal enquadrada, segundo a figura a seguir?

Provas
Questão presente nas seguintes provas
A diferença entre uma imagem multiespectral e uma imagem hiperespectral consiste
Provas
Questão presente nas seguintes provas
Dentre as técnicas de pré-processamento existem as técnicas de realce, que são funções
operacionais para remover ou corrigir os erros e as distorções introduzidos nas imagens pelos
sistemas sensores. Qual das técnicas de realce é uma transformação espacial?
Provas
Questão presente nas seguintes provas
Sobre Sensoriamento Remoto, seguem as afirmativas:
I. A órbita Sol-síncrona é uma órbita polar que mantém um ângulo variável entre o Sol, a Terra e o satélite.
II. Ao incidir sobre um objeto, a energia eletromagnética sofre interações com o material que o compõe sendo parcialmente refletida ou transmitida.
III. O Sol é a principal fonte de radiação eletromagnética utilizada pelo Sensoriamento Remoto.
IV. O nível de aquisição de dados em Sensoriamento Remoto é de natureza orbital.
Estão CORRETAS:
I. A órbita Sol-síncrona é uma órbita polar que mantém um ângulo variável entre o Sol, a Terra e o satélite.
II. Ao incidir sobre um objeto, a energia eletromagnética sofre interações com o material que o compõe sendo parcialmente refletida ou transmitida.
III. O Sol é a principal fonte de radiação eletromagnética utilizada pelo Sensoriamento Remoto.
IV. O nível de aquisição de dados em Sensoriamento Remoto é de natureza orbital.
Estão CORRETAS:
Provas
Questão presente nas seguintes provas
Relacione as colunas a seguir conforme o conceito ou a aplicação de cada tipo de
posicionamento Global Navigation Satellite System (GNSS).
1. Precise of Point Position (PPP)
2. Differential Global Positioning System (DGPS)
3. Real-time Kinematic (RTK) em rede
4. Real-time Kinematic (RTK) convencional
( ) As coordenadas do vértice de interesse são determinadas de forma absoluta, portanto dispensa o uso de receptor instalado sobre um vértice de coordenadas conhecidas.
( ) A observável usada é a pseudodistância a partir do código C/A. Sua aplicação nos serviços de georreferenciamento de imóveis rurais fica restrita ao posicionamento dos vértices situados em limites naturais.
( ) Em vez de apenas uma estação de referência, existem várias estações de monitoramento contínuo conectadas a um servidor central, a partir do qual são distribuídos, por meio da internet, os dados de correção aos receptores móveis.
( ) No modo convencional os dados de correção são transmitidos por meio de um link de rádio do receptor instalado no vértice de referência ao(s) receptor(es) que percorre(m) os vértices de interesse. A solução encontrada é uma linha de base única.
( ) Disponibiliza dados de correção via protocolo internet conhecido por Networked Transport of Radio Technical Committee for Maritime Service (RTCM) via Internet Protocol (NTRIP), em formato definido pelo RTCM. A possibilidade de se efetuar posicionamento relativo cinemático em tempo real, a partir desse serviço, fica restrita a locais situados próximos às estações de referência da Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS (RBMC).
A ordem CORRETA, de cima para baixo, de associação entre as colunas é:
1. Precise of Point Position (PPP)
2. Differential Global Positioning System (DGPS)
3. Real-time Kinematic (RTK) em rede
4. Real-time Kinematic (RTK) convencional
( ) As coordenadas do vértice de interesse são determinadas de forma absoluta, portanto dispensa o uso de receptor instalado sobre um vértice de coordenadas conhecidas.
( ) A observável usada é a pseudodistância a partir do código C/A. Sua aplicação nos serviços de georreferenciamento de imóveis rurais fica restrita ao posicionamento dos vértices situados em limites naturais.
( ) Em vez de apenas uma estação de referência, existem várias estações de monitoramento contínuo conectadas a um servidor central, a partir do qual são distribuídos, por meio da internet, os dados de correção aos receptores móveis.
( ) No modo convencional os dados de correção são transmitidos por meio de um link de rádio do receptor instalado no vértice de referência ao(s) receptor(es) que percorre(m) os vértices de interesse. A solução encontrada é uma linha de base única.
( ) Disponibiliza dados de correção via protocolo internet conhecido por Networked Transport of Radio Technical Committee for Maritime Service (RTCM) via Internet Protocol (NTRIP), em formato definido pelo RTCM. A possibilidade de se efetuar posicionamento relativo cinemático em tempo real, a partir desse serviço, fica restrita a locais situados próximos às estações de referência da Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS (RBMC).
A ordem CORRETA, de cima para baixo, de associação entre as colunas é:
Provas
Questão presente nas seguintes provas
Algumas fontes de erros no uso de tecnologias GNSS são: 1 – Satélite; 2 – Propagação do
Sinal; 3 – Receptor/Antena; 4 – Estação. A seguir, na tabela, apresentam-se alguns erros que
essas fontes geram.

A ordem CORRETA, de cima para baixo, de associação do erro com sua respectiva fonte causadora é:
A ordem CORRETA, de cima para baixo, de associação do erro com sua respectiva fonte causadora é:
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container