Foram encontradas 50 questões.
I. Se e somente se todos os polos estiverem dentro do círculo unitário (centrado na origem do plano Z), o sistema é assintoticamente estável.
II. O sistema é instável se e somente se existirem polos de multiplicidade maior que um sobre o círculo unitário.
III. O sistema é marginalmente instável se polos não repetidos estiverem sobre o círculo unitário e não existirem polos fora do círculo unitário.
Provas
Considere o diagrama de blocos da Figura 7 abaixo:
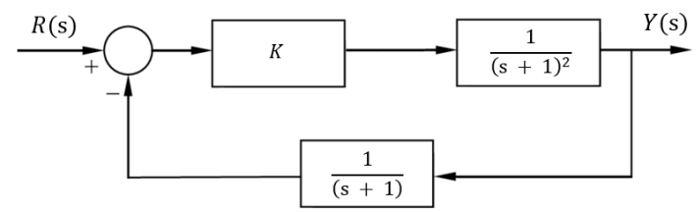
Figura 7
Assinale a alternativa que corresponde ao intervalo de valores de K que garante a estabilidade do sistema em malha fechada.
Provas
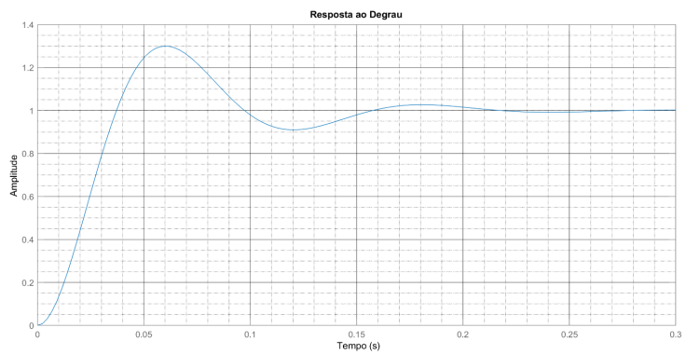
Figura 6
Provas
Considere o sistema de controle com retroalimentação unitária mostrado na Figura 5 abaixo:
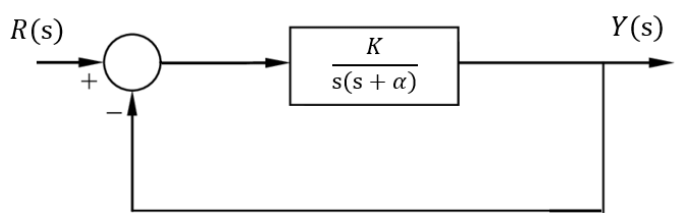
Figura 5
Determine os valores de K e α para os quais a resposta a um degrau unitário é subamortecida (ζ = 0,5) e apresenta um tempo de 2 segundos para que as oscilações transitórias permaneçam dentro de uma faixa de 2% em torno do valor final do regime permanente.
Provas
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
Provas
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
Provas
Provas
É bem comum projetar sistemas de controle em malha fechada com base na combinação das ações proporcional e integral. De acordo com as características desse controlador, assinale a alternativa correta.
Provas
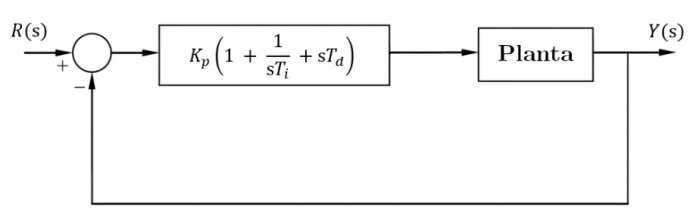
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Provas

Figura 3
Provas
Caderno Container