Foram encontradas 792 questões.
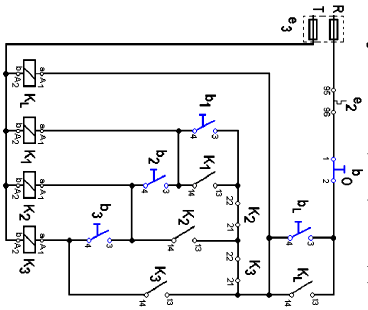
O diagrama de comandos elétricos é mais adequado para o seguinte acionamento:
Provas
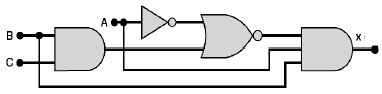
Uma expressão lógica simplificada para o circuito lógico a seguir é:
Provas
Controlador de processos utilizado que melhor apresenta comportamento servo; porém, com alto sobressinal, é:
Provas
Considerando os sistemas microprocessados, relacione adequadamente as colunas quanto à classificação.
1. Sistema microprocessado com hardware para aritmética de ponto flutuante.
2. Sistema microprocessado com hardware sem adaptação para aritmética de ponto flutuante.
( ) Tiva – Cortex M4.
( ) Arduino.
( ) FPGA.
( ) Microcontroladores PIC.
( ) Processadores digitais de sinais.
A sequência correta está em
Provas
NÃO representa uma tecnologia fortemente marcada pela quarta revolução industrial:
Provas
Sobre resistência dos materiais, marque V para as afirmativas verdadeiras e F para as falsas.
( ) As forças de superfícies são causadas pelo contato direto de um corpo com a superfície de outro. Em todos os casos essas forças são distribuídas pela área de contato entre os corpos.
( ) As forças de corpo são normalmente representadas por uma única força concentrada que atua sobre o corpo; um exemplo é a gravidade.
( ) A força de cisalhamento é criada quando as cargas externas tendem a torcer uma parte do corpo em relação à outra.
( ) O momento fletor é uma força que atua perpendicularmente à área. É criada sempre que as forças externas tendem a empurrar ou puxar as duas partes do corpo.
( ) O momento de torção é criado quando as cargas externas tendem a provocar o deslizamento das partes do corpo, uma sobre a outra.
A sequência correta está em
Provas
No circuito a seguir, considere RL = 100 ohms; +V = 12V; VBE = 0,7V; e, uma saturação forte, onde Ic/Ib = 10.
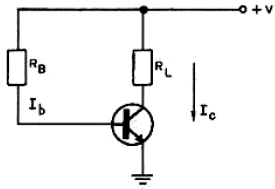
O valor de Rb é, aproximadamente:
Provas
“Em um sistema , o pressurizado é produzido por .” Assinale a alternativa que completa correta e sequencialmente a afirmativa anterior.
Provas
Relacione adequadamente as colunas a seguir.
1. Método de relé em malha fechada.
2. Método do modelo interno.
3. Método do ganho e período críticos.
4. Preditor de Smith.
5. Comportamento servo.
6. Comportamento regulatório.
( ) Comportamento realizado pelo controlador do processo mediante distúrbios.
( ) Método utilizado para obter no limite da estabilidade os valores do ganho e período críticos, mas que é inviável em muitos casos na prática.
( ) Comportamento realizado para o controlador para “rastrear o setpoint”.
( ) Método utilizado para obter o ganho e o período crítico sem levar o sistema dinâmico ao limite da estabilidade.
( ) Método utilizado para se obter o controlador dado um desempenho requerido e um modelo da planta a se controlar.
( ) Minimiza os efeitos do tempo morto da planta no controle de malha.
A sequência correta está em
Provas
Sobre sintonia de controladores PID, marque V para as afirmativas verdadeiras e F para as falsas.
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
Provas
Caderno Container