Foram encontradas 8.955 questões.
| ponto | abscissa | ordenada |
| A | 385,00 | 154,00 |
| B | 177,00 | 317,00 |
Provas
Provas
Provas
Provas
Provas
Provas
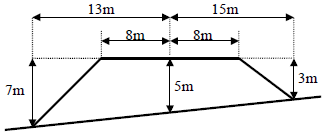
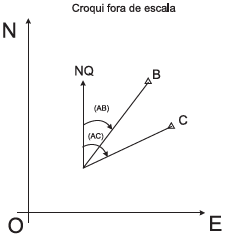
Reponda a questão utilizando o croqui e os dados abaixo.
Dados:
Sistema de Coordenadas: Coordenadas Planas com origem no Ponto “O”
EO = 0,00 m NO = 0,00 m
Coordenadas dos Pontos
Ponto A:
EA = 100.000,00 m
NA = 100.000,00 m
Ponto B:
EB = ???
NB = ???
Ponto C:
EC = 117.400,00 m
NC = 110.000,00 m
Medições Lineares
Distância AB = 20.000,00 m Distância AC = ???
Medições Angulares
Azimute (AB) = 045° 00’ 00" Azimute (AC) = ???
Constante
sen 30° = 0,5 !$ ∴ !$ sen 45° = 0,71 !$ ∴ !$ sen 60° = 0,87
O azimute de quadrícula do ponto A ao ponto C é igual a:
Provas
Reponda a questão utilizando o croqui e os dados abaixo.
Dados:
Sistema de Coordenadas: Coordenadas Planas com origem no Ponto “O”
EO = 0,00 m NO = 0,00 m
Coordenadas dos Pontos
Ponto A:
EA = 100.000,00 m
NA = 100.000,00 m
Ponto B:
EB = ???
NB = ???
Ponto C:
EC = 117.400,00 m
NC = 110.000,00 m
Medições Lineares
Distância AB = 20.000,00 m Distância AC = ???
Medições Angulares
Azimute (AB) = 045° 00’ 00" Azimute (AC) = ???
Constante
sen 30° = 0,5 !$ ∴ !$ sen 45° = 0,71 !$ ∴ !$ sen 60° = 0,87
As coordenadas E e N do ponto B no plano topográfico, respectivamente, são:
Provas
Para responder a questão, utilize as informações a seguir.
A tabela contém informações extraídas do certificado de calibração de uma câmara fotogramétrica analógica. Após a digitalização de um fotograma obtido com a câmara em questão, foram efetuadas as medições das marcas fiduciais, em pixels, cujos valores de linha e coluna também se encontram listados.
| MARCA |
COORDENADAS DO CERTIFICADO DE CALIBRAÇÃO DA CÂMARA | COORDENADAS MEDIDAS NO FOTOGRAMA DIGITALIZADO |
||||
| x(mm) |
σ(mm) | y(mm) | σ(mm) | coluna | linha |
|
| M1 |
-113,000 | 0,006 | 0,000 |
0,004 | 12 | 1122 |
| M2 |
113,000 | 0,003 | 0,000 | 0,005 | 2250 | 1138 |
| M3 |
0,000 | 0,001 | 113,000 | 0,003 | 1140 | 18 |
| M4 |
0,000 | 0,004 | -113,000 | 0,004 | 1123 | 2280 |
Considere agora o cálculo dos parâmetros ajustados da transformação geométrica de milímetros para pixels, também pelo método paramétrico de ajustamento por mínimos quadrados. No cálculo ora em questão, haverá a necessidade de se estabelecer uma ponderação para as observações, por intermédio de uma matriz de pesos. Para tal, considere o modelo funcional e a formulação para a matriz de pesos a seguir.
Coluna = g + h*x + i*y
Linha = j + k*x + I*y
P = !$ σ^2_0 . \textstyle \sum_{Lb}^{-1} !$
Supondo as observações independentes, que matriz dos pesos está corretamente instanciada?
Provas
Para responder a questão, utilize as informações a seguir.
A tabela contém informações extraídas do certificado de calibração de uma câmara fotogramétrica analógica. Após a digitalização de um fotograma obtido com a câmara em questão, foram efetuadas as medições das marcas fiduciais, em pixels, cujos valores de linha e coluna também se encontram listados.
| MARCA |
COORDENADAS DO CERTIFICADO DE CALIBRAÇÃO DA CÂMARA | COORDENADAS MEDIDAS NO FOTOGRAMA DIGITALIZADO |
||||
| x(mm) |
σ(mm) | y(mm) | σ(mm) | coluna | linha |
|
| M1 |
-113,000 | 0,006 | 0,000 |
0,004 | 12 | 1122 |
| M2 |
113,000 | 0,003 | 0,000 | 0,005 | 2250 | 1138 |
| M3 |
0,000 | 0,001 | 113,000 | 0,003 | 1140 | 18 |
| M4 |
0,000 | 0,004 | -113,000 | 0,004 | 1123 | 2280 |
Considere a necessidade de calcular os parâmetros ajustados da transformação geométrica de pixels para milímetros, pelo método paramétrico de ajustamento por mínimos quadrados. Para tal, considere o modelo funcional abaixo.
x = a + b*Coluna + c*Linha
y = d + e*Coluna + f* Linha
As matrizes dos coeficientes dos parâmetros (Matriz A) e a das observações (Matriz LB) serão, respectivamente, iguais a:
Provas
Caderno Container