Foram encontradas 658 questões.
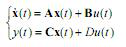
Um sistema dinâmico linear de ordem n possui a
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Se houver desacoplamento entre todas as variáveis de estado, a matriz A, no sistema em apreço, poderá ser diagonal.representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
Um sistema dinâmico linear de ordem n possui a
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Um sistema dinâmico linear possui uma única representação no espaço de estados.representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
Um sistema dinâmico linear de ordem n possui a
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
A função de transferência representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
Um sistema dinâmico linear de ordem n possui a
representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Sendo o sistema em questão de ordem n, a matriz B terá ordem n × 1.representação, no espaço de estados, dada pelas equações a
seguir, em que u(t) é uma variável de entrada escalar, y(t) é uma
variável de saída escalar, x é o vetor de estado e A, B, C e D
caracterizam parametricamente o sistema.
A partir dessas informações, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
A respeito do amplificador operacional, um dispositivo utilizado
em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
A característica de slew rate do amplificador operacional indica, em mA, uma limitação em sua corrente de polarização.em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
A respeito do amplificador operacional, um dispositivo utilizado
em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
O amplificador operacional deve possuir baixa impedância de saída.em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
A respeito do amplificador operacional, um dispositivo utilizado
em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
O amplificador operacional deve possuir baixa impedância de entrada.em instrumentação eletrônica, como elemento em circuitos de
condicionamento de sinais, julgue os itens a seguir.
Provas
Questão presente nas seguintes provas
O projeto do controlador de um processo dinâmico é feito a partir
de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
A fim de melhorar as características de erro em regime permanente, é correto o uso de um compensador de atraso de fase.de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
Provas
Questão presente nas seguintes provas
O projeto do controlador de um processo dinâmico é feito a partir
de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
O compensador proporcional-derivativo (PD), quando em cascata com o processo a ser controlado, insere um pólo, da função de transferência de malha aberta, na origem do plano complexo.de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
Provas
Questão presente nas seguintes provas
O projeto do controlador de um processo dinâmico é feito a partir
de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
A compensação não pode ser realizada colocando-se o compensador no caminho de realimentação do sistema.de especificações de desempenho que poderão ser fornecidas em
termos de resposta temporal ou resposta em frequência. No caso
de especificações de desempenho no domínio do tempo, tem-se
a resposta transitória, normalmente para uma excitação do tipo
degrau, e a resposta em regime permanente, para certos tipos de
excitações. A respeito dos controladores dinâmicos e das técnicas
de controle, julgue os itens subsequentes.
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container