Foram encontradas 653 questões.
aComplete, corretamente, as lacunas do texto a seguir sobre o problema de cinemática de manipuladores.
Considerando-se um robô industrial, o problema de cinemática direta está interessado em determinar de , com base em de .
A sequência que preenche as lacunas de forma correta é
Provas
Um codificador óptico, ou encoder, é um tipo de sensor usado para medição da posição de juntas de revolução. Considere que uma dada junta movimenta-se com velocidade constante e foi usado um encoder do tipo incremental para medir a variação da posição. Durante a aquisição dos dados, a forma de onda que melhor representa a saída deste encoder é dada por
Provas
O controlador do tipo PD é comumente usado no controle desacoplado de manipuladores robóticos. Com relação à função de transferência ideal desse tipo de controlador, é correto afirmar que se introduz no ramo direto da malha de controle um
Provas
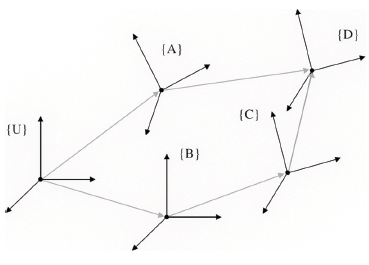
Considerando-se as matrizes de transformação correspondentes aos referenciais mostrados na figura a seguir, NÃO é correto afirmar que
Provas
Considere o seguinte algoritmo de planejamento de caminhos:
1 - Siga em direção à posição alvo.
2 - Caso um obstáculo seja encontrado: a. Contorne o obstáculo por completo; b. Lembre o ponto mais próximo do alvo.
3 - Retorne usando a menor rota ao ponto mais próximo guardado e continue em direção ao alvo.
Em termos gerais, é correto afirmar que esse algoritmo representa
Provas
Considere um potenciômetro de precisão multivoltas, utilizado para medir o ângulo em uma junta. Um conversor AD (analógico/digital) de 4 bits é usado para leitura deste sensor.
Neste caso, a resolução da medição será, em graus, de
Provas
Quais dos elementos sensores a seguir NÃO são utilizados para se estimar a orientação do robô no espaço?
Provas
Numere os eventos sequencialmente, do primeiro ao último passo, usados no algoritmo de planejamento 2D utilizando grafo de visibilidade.
( ) Aplique o algoritmo A* .
( ) Determine o espaço de configurações livres.
( ) Trace linhas de visibilidade entre a configuração alvo e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre a configuração inicial e os obstáculos visíveis.
( ) Trace linhas de visibilidade entre todos os obstáculos.
A sequência correta de eventos é
Provas
Preencha corretamente as lacunas do texto a seguir com relação às características dos sensores presentes em robôs.
Em um manipulador industrial, o encoder óptico é um sensor usado para medir , sendo qualificado como . Já o laser é um sensor usado para medir , sendo classificado como .
Provas
Analise as asserções a seguir e a relação proposta entre elas.
I - Em alguns manipuladores robóticos apenas a medição de posição das juntas está disponível, sendo necessário estimar a velocidade com auxílio de filtros ou observadores
PORQUE
II - a estimação da velocidade por meio da derivada numérica (aproximação de Euler) amplifica ruídos de medição.
A respeito das asserções, é correto afirmar que
Provas
Caderno Container