Foram encontradas 653 questões.
Respondida
Qual abordagem NÃO é utilizada para obter funções de transferência em tempo discreto cuja resposta aproxima a resposta de funções de transferência em tempo contínuo?
Respondida
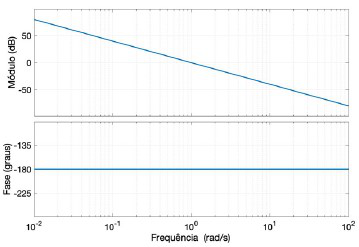
Assinale a alternativa que apresenta os valores da margem de ganho (!$ MG !$ ) e da margem de fase (!$ MF !$ ) que são obtidos pelo diagrama de Bode apresentado na figura a seguir.
Respondida
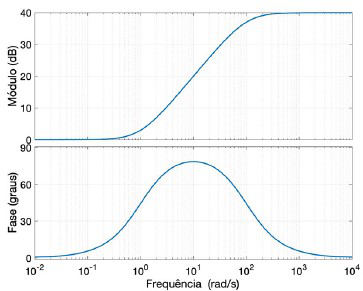
Considere o diagrama de Bode apresentado na figura a seguir.
Esse diagrama de Bode apresenta a resposta em frequência de qual tipo de controlador?
Respondida
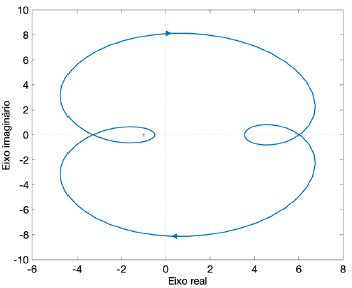
Seja G(s) uma função de transferência estável, cujo diagrama de Nyquist é apresentado na figura a seguir.
Sendo !$ F(s) = \dfrac{G(s)}{1+G(s)}, !$ é correto afirmar que
Respondida
Assinale a alternativa que apresenta os valores da margem de ganho (MG ) e da margem de fase(MF ) que são obtidos pelo diagrama de Nyquist apresentado na figura a seguir
Respondida
Sobre controladores é INCORRETO afirmar que
Respondida
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
A
!$ \begin{bmatrix}x_1&(K+1)\\x_2&(K+1)\end{bmatrix}=\begin{bmatrix} 0,5&-1\\0&-0,5 \end{bmatrix}\begin{bmatrix}x_1&(K)\\x_2&(K)\end{bmatrix}+\begin{bmatrix}2\\1\end{bmatrix}u(K),\,y(K)=\begin{bmatrix} 1&3\end{bmatrix}\begin{bmatrix} x_1&(K)\\x_2&(K)\end{bmatrix} !$
B
!$ \begin{bmatrix}x_1&(K+1)\\x_2&(K+1)\end{bmatrix}=\begin{bmatrix} -0,5&-1\\0&-0,5 \end{bmatrix}\begin{bmatrix}x_1&(K)\\x_2&(K)\end{bmatrix}+\begin{bmatrix}1\\2\end{bmatrix}u(K),\,y(K)=\begin{bmatrix} 1&2\end{bmatrix}\begin{bmatrix} x_1&(K)\\x_2&(K)\end{bmatrix} !$
C
!$ \begin{bmatrix}x_1&(K+1)\\x_2&(K+1)\end{bmatrix}=\begin{bmatrix} 0,5&1\\0,5&0,5 \end{bmatrix}\begin{bmatrix}x_1&(K)\\x_2&(K)\end{bmatrix}+\begin{bmatrix}2\\3\end{bmatrix}u(K),\,y(K)=\begin{bmatrix} 1&1\end{bmatrix}\begin{bmatrix} x_1&(K)\\x_2&(K)\end{bmatrix} !$
D
!$ \begin{bmatrix}x_1&(K+1)\\x_2&(K+1)\end{bmatrix}=\begin{bmatrix} -0,5&1\\0,5&0,5 \end{bmatrix}\begin{bmatrix}x_1&(K)\\x_2&(K)\end{bmatrix}+\begin{bmatrix}3\\1\end{bmatrix}u(K),\,y(K)=\begin{bmatrix} 2&1\end{bmatrix}\begin{bmatrix} x_1&(K)\\x_2&(K)\end{bmatrix} !$
E
!$ \begin{bmatrix}x_1&(K+1)\\x_2&(K+1)\end{bmatrix}=\begin{bmatrix} -0,5&1,4\\0,5&0,5 \end{bmatrix}\begin{bmatrix}x_1&(K)\\x_2&(K)\end{bmatrix}+\begin{bmatrix}1\\3\end{bmatrix}u(K),\,y(K)=\begin{bmatrix} 3&1\end{bmatrix}\begin{bmatrix} x_1&(K)\\x_2&(K)\end{bmatrix} !$
Respondida
Qual sistema definido pelas equações em espaço de estados a seguir é instável?
A
!$ \begin{bmatrix}.\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -4&-1\\0&-2 \end{bmatrix}\begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix}2\\1\end{bmatrix}u(t),\,y(t)=\begin{bmatrix} 1&3\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
B
!$ \begin{bmatrix}.\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -3&-1\\0&-1 \end{bmatrix}\begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix}1\\1\end{bmatrix}u(t),\,y(t)=\begin{bmatrix} 1&3\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
C
!$ \begin{bmatrix}.\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -2&0\\0&-1 \end{bmatrix}\begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix}2\\1\end{bmatrix}u(t),\,y(t)=\begin{bmatrix} 1&3\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
D
!$ \begin{bmatrix}.\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -2&-3\\-1&-2 \end{bmatrix}\begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix}2\\1\end{bmatrix}u(t),\,y(t)=\begin{bmatrix} 1&1\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
E
!$ \begin{bmatrix}.\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -2&-3\\-1&-1 \end{bmatrix}\begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix}-1\\1\end{bmatrix}u(t),\,y(t)=\begin{bmatrix} 2&1\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
Respondida
Considere o sistema definido pelas equações em espaço de estados:
!$ \begin{bmatrix} .\\x_1&(t)\\.\\x_2&(t)\end{bmatrix}=\begin{bmatrix} -4&-1\\0&-2 \end{bmatrix} !$ !$ \begin{bmatrix}x_1&(t)\\x_2&(t)\end{bmatrix}+\begin{bmatrix} 2\\1 \end{bmatrix}u(t)\,y(t)=\begin{bmatrix} 1&3\end{bmatrix}\begin{bmatrix} x_1&(t)\\x_2&(t)\end{bmatrix} !$
Assinale a função de transferência que representa este sistema.