Foram encontradas 30 questões.
Os ângulos Roll-Pitch-Yaw (RPY) são usados como representação mínima de orientação. Em certas posturas de um corpo rígido, porém, podem ocorrer singularidades de representação, ou seja, não é possível obter um único conjunto de ângulos RPY a partir da matriz de rotação. A única alternativa de representação de orientação que NÃO apresenta esse problema é:
Provas
Questão presente nas seguintes provas
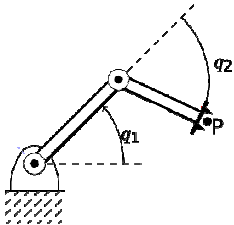
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar:
Provas
Questão presente nas seguintes provas
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:

Provas
Questão presente nas seguintes provas
Em redes industriais ProfiBus são utilizados dois mecanismos de acesso ao meio, conhecidos como passagem de token e polling. Verifique se as alternativas abaixo são CERTAS (C) ou ERRADAS (E):
( ) O mecanismo de passagem de token é utilizado na comunicação entre múltiplos mestres presentes na rede.
( ) O mecanismo de polling é utilizado na comunicação entre os escravos presentes na rede.
( ) O mecanismo de polling é usado por um mestre que está com o token para se comunicar com os dispositivos escravos.
( ) O token é passado entre os mestres numa sequência descendente de endereços de dispositivos.
Provas
Questão presente nas seguintes provas
Em relação à programação de robôs, assinale a única alternativa que apresenta uma correspondência correta de itens numerados em romano com itens em ordem alfabética:
I. Pode ser feita online.
II. É baseada em linguagens textuais.
III. Reduz o tempo de parada de produção.
IV. Pode conter lógicas complexas.
V. Utilizável apenas para operações de repetição de pontos.
A. Programação por demonstração/repetição.
B. Programação por linguagens de robôs.
C. Programação por linguagens de tarefas.
Provas
Questão presente nas seguintes provas
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
Questão presente nas seguintes provas
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
Questão presente nas seguintes provas
Um dos problemas inerentes à autonomia em robótica móvel é a navegação em ambientes desconhecidos, que podem ter obstáculos e variar no tempo, a partir de uma posição inicial conhecida e com informações limitadas adquiridas por sensores. Marque a alternativa que corresponde à linha de pesquisa que estuda soluções para esse problema:
Provas
Questão presente nas seguintes provas
Leia as afirmativas expostas abaixo sobre a relação entre os tipos de instalação e layouts utilizados para diferentes níveis de quantidade produzida e variedade de produto:
I. Em caso de produtos grandes e pesados, onde a produção é feita por encomenda e onde há dificuldade de deslocamento, o layout de posição fixa é utilizado ao menos durante a montagem final e as peças individuais destes grandes produtos fazem uso do layout por produto.
II. A produção em quantidade envolve a produção em massa de peças individuais, e normalmente envolve máquinas-padrão que ficam dedicadas à produção de um tipo de peça. Neste tipo de produção a organização física típica é a do layout por processo.
III. O layout celular é utilizado quando a faixa de produção é média e quando a variedade de produto é leve, onde cada célula é especializada na produção de uma variedade limitada de configurações de peças.
Provas
Questão presente nas seguintes provas
Abaixo são apresentadas quatro características sobre os níveis de automação e controle na produção:
I. Compreende funções de controle que incluem a execução da sequência de etapas no programa de instruções e a certificação de que cada etapa foi adequadamente executada.
II. Compreende elementos sensores, atuadores e outros componentes de hardware, que são combinados em loops individuais de controle.
III. Compreende as funções necessárias ao gerenciamento da empresa, como marketing e vendas, contabilidade, projeto, pesquisa, planejamento agregado e plano mestre de produção.
IV. Consiste em um grupo de máquinas ou estações de trabalho conectadas e apoiadas por um computador ou outro equipamento apropriado ao processo de produção.
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container