Foram encontradas 769 questões.
No domínio da Automação Industrial, o CLP utiliza módulos PID,
que são empregados em aplicações em anel fechado para que a
variável controlada possa retornar ao set-point pré-fixado. O
algoritmo PID calcula o sinal atuantes (U) sobre o sinal de erro (E).
Sobre as ações do controlador PID, assinale a opção correta.
Sobre as ações do controlador PID, assinale a opção correta.
Provas
Questão presente nas seguintes provas
Classifique as seguintes afirmações acerca de condicionamento de
sinais como verdadeiro (V) ou falso (F):
I. Buffers baseados em amplificadores operacionais são utilizados antes de conversores analógico-digitais (ADC) para impedir que a impedância de entrada do conversor provoque carregamento do sinal e distorça a leitura.
II. Filtros anti-aliasing devem possuir frequência de corte inferior à frequência de Nyquist, a fim de limitar componentes espectrais indesejados.
III. Para sinais de baixa amplitude, realizar a digitalização diretamente no ADC, sem amplificação prévia, reduz o erro de quantização.
É correto o que se apresenta em:
I. Buffers baseados em amplificadores operacionais são utilizados antes de conversores analógico-digitais (ADC) para impedir que a impedância de entrada do conversor provoque carregamento do sinal e distorça a leitura.
II. Filtros anti-aliasing devem possuir frequência de corte inferior à frequência de Nyquist, a fim de limitar componentes espectrais indesejados.
III. Para sinais de baixa amplitude, realizar a digitalização diretamente no ADC, sem amplificação prévia, reduz o erro de quantização.
É correto o que se apresenta em:
Provas
Questão presente nas seguintes provas
A respeito dos principais tipos de sensores empregados como
dispositivos de chaveamento em atuadores elétricos, analise as
afirmações a seguir:
I. Sensores indutivos detectam materiais metálicos, pois operam pela alteração do campo eletromagnético gerado pelo próprio sensor.
II. Sensores capacitivos podem detectar líquidos, pós e materiais orgânicos, devido à variação da constante dielétrica do meio.
III. Chaves magnéticas do tipo reed switch realizam a comutação sem contato mecânico direto entre partes móveis.
É correto o que se apresenta em:
I. Sensores indutivos detectam materiais metálicos, pois operam pela alteração do campo eletromagnético gerado pelo próprio sensor.
II. Sensores capacitivos podem detectar líquidos, pós e materiais orgânicos, devido à variação da constante dielétrica do meio.
III. Chaves magnéticas do tipo reed switch realizam a comutação sem contato mecânico direto entre partes móveis.
É correto o que se apresenta em:
Provas
Questão presente nas seguintes provas
Seja o problema do regulador quadrático ótimo para um sistema
linear descrito pela equação de estados:
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional

em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
ẋ = Ax + Bu
em que x é o vetor de estados, u é o vetor de entradas e A e B são as matrizes do modelo em espaço de estados.
Neste problema de controle ótimo, minimiza-se o funcional
em que Q e R são matrizes de ponderação, a fim de obter a matriz de ganhos K da lei de controle por realimentação completa de estados u = −Kx.
A solução passa pela obtenção de uma matriz S, solução de uma equação de Riccati, extraída da formulação do problema.
Analise os itens a seguir relacionados à solução do problema de controle do regulador ótimo quadrático:
I. O ganho K é igual a R −1B TS. II. As matrizes Q, R e S devem ser positivas semidefinidas. III. O sistema em malha fechada é estável se o par (A,B) for controlável.
Está correto o que se afirma em
Provas
Questão presente nas seguintes provas
Numa condição-transição de um dado GRAFCET encontra-se a
expressão “3s/a/7s” em que a é uma variável booleana.
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Se a variável a for verdadeira por 12s seguidos e falsa, caso contrário, a duração total na qual a expressão “3s/a/7s” será verdadeira, em segundos, será
Provas
Questão presente nas seguintes provas
Um motor CC de imã permanente gera uma força contra
eletromotriz a uma razão de 0,5 V/100 rpm e possui uma
resistência de armadura igual a 15Ω. O motor incialmente parado
é alimentado com 12V.
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
Provas
Questão presente nas seguintes provas
Seja uma rede de Petri com os seguintes elementos:
• Conjunto de lugares: P = {p1,p2,p3,p4}
• Conjunto de transições: T = {a,b,c,d}
• Pré condições das transições:
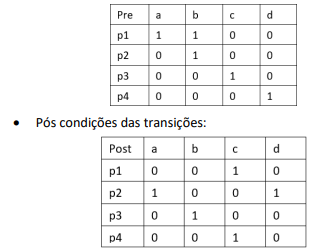
Considere que a rede está com uma marcação inicial p1 = 2, p2 = 0, p3 = 0 e p4 = 0, e disparam-se as transições a, b, c e d, em sequência e nesta ordem.
A marcação final da rede será
Provas
Questão presente nas seguintes provas
Um sensor de força utiliza-se de um potenciômetro linear atrelado
a uma mola. Deseja-se que a faixa de leitura deste sensor seja de
0 a F newtons, correspondendo a um deslocamento máximo do
conjunto de D centímetros, e que a sensibilidade seja S volts por
newtons. O potenciômetro movimenta-se linearmente solidário à
deformação da mola e sua resistência varia linearmente com seu
deslocamento e sua máxima excursão é de X centímetros, sendo
X > D.
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
Provas
Questão presente nas seguintes provas
Considere o seguinte sistema SISO representado na forma de espaço de estados:
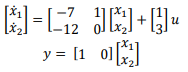
A representação deste mesmo sistema em função de transferência é
Provas
Questão presente nas seguintes provas
Um sistema com equação de estados:
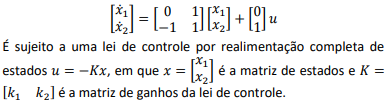
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container