Foram encontradas 45 questões.
Com o auxílio de conversores A/D e D/A, um filtro digital é programado com o auxílio da sub-rotina de interrupção a seguir, que é invocada após cada aquisição de dado analógico.
void interrupt rotinaISR(...) {
xn[1] = xn[0];
xn[0]=le_dado_AD(); /* lê A/D */
yn = 2*xn[0] - xn[1] - yn;
escreve_dado_DA(yn) /* escreve no D/A */;
}
Assinale a opção que apresenta a equação implementada pelo filtro digital.
Provas
Seja o dicionário e o código em Python listados a seguir.
base_de_dados = {
'PAISES':['JAPAO','EUA','BRASIL','SUECIA'],
'COMIDA':['UVA','PAO','ARROZ','FAROFA'],
}
relacao = list(base_de_dados.items())
valor = relacao[1][1][3]
Ao final da execução, valor é
Provas
- Fundamentos de ProgramaçãoAlgoritmosAnálise de Execução de Algoritmos
- Fundamentos de ProgramaçãoVariáveis
- LinguagensPython
Seja o código em Python a seguir.
>>> a = 1
>>> a, b, c = 3, 4*a, 5*a
>>> d = a*b*c
>>> |
Ao final da execução, o valor da variável d é
Provas
O código a seguir refere-se à rotina de interrupção invocada em um microcontrolador toda vez que é finalizada uma conversão analógica-digital de 16 bits. As duas últimas linhas programam nos registradores OCR1B e ADMUX o instante do início da conversão.
/* rotina ISR de interrupção do ADC */
ISR(ADC_vect){
/* composição do valor lido do ADC */
adcresultado = ADCL; // byte menos significativo
(lsb)
adcresultado = adcresultado | (ADCH<<8); // msb
sensor[canal] = adcresultado;
canal++; if ((canal&0x07)==0) canal=0; // canal próxima
conversão
OCR1B = 15000 + (canal*1000); // agenda próxima
conversão
ADMUX = (1<<REFS0)+canal; // programa canal de conversão
}
Assinale a opção que indica o número de canais analógicos utilizados no rodízio de aquisições.
Provas
O código a seguir é parte de um protocolo para a leitura dos dados do acelerômetro MPU6050.
ISR(TWI_vect){
if (I2Cestado == 1){
if ( (TWSR&0xF8)!=COD_START_OK )
TWI_erro(7,I2Cestado);
TWDR=MPU_WR; // endereço de escrita no MPU
TWCR = (1<<TWINT) | (1<<TWEN) | (1<<TWIE); // envia
end.
}
...
if (I2Cestado == 5){
if ((TWSR&0xF8)!=COD_SLA_RD_ACK)
TWI_erro(7,I2Cestado);
/* inicia a recepção do dados do MPU */
TWCR = (1<<TWINT) | (1<<TWEA) | (1<<TWEN) | (1<<TWIE);
}
if (I2Cestado>5 && I2Cestado<18){
if ((TWSR&0xF8)!=COD_RX_DATA_ACK)
TWI_erro(7,I2Cestado);
MPUvet[MPUix++]=TWDR; // recebe um dado
/* prepara para receber próximo dado do MPU */
TWCR = (1<<TWINT) | (1<<TWEA) | (1<<TWEN) | (1<<TWIE);
}
if (I2Cestado==18){
if ((TWSR&0xF8)!=COD_RX_DATA_ACK)
TWI_erro(7,I2Cestado);
MPUvet[MPUix++]=TWDR; // recebe penúltimo dado
/* prepara para receber o último dado e gerar NACK */
TWCR = (1<<TWINT) | (1<<TWEN) | (1<<TWIE); // NACK
}
if (I2Cestado == 19){
if ((TWSR&0xF8)!=COD_RX_DATA_NACK)
TWI_erro(7,I2Cestado);
MPUvet[MPUix++]=TWDR; // recebe último dado
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO); // envia STOP
MPUax=(MPUvet[0]<<8) | MPUvet[1];
MPUay=(MPUvet[2]<<8) | MPUvet[3];
MPUaz=(MPUvet[4]<<8) | MPUvet[5];
MPUtp=(MPUvet[6]<<8) | MPUvet[7];
MPUgx=(MPUvet[8]<<8) | MPUvet[9];
MPUgy=(MPUvet[10]<<8)| MPUvet[11];
MPUgz=(MPUvet[12]<<8)| MPUvet[13];
}
I2Cestado++; // incrementa estado
}
Após uma análise preliminar do código acima, é correto concluir que a leitura das informações foi realizada, sequencialmente, em
Provas
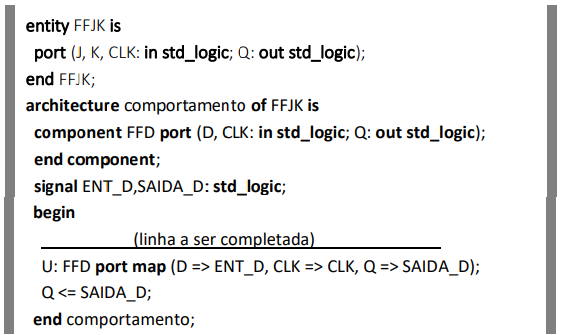
Assinale a opção que completa corretamente a linha assinalada.
Provas
Disciplina: TI - Organização e Arquitetura dos Computadores
Banca: FGV
Orgão: INPE
O mais sensato, em função da sua posição, é substituir o cristal queimado por um cristal, cuja frequência em MHz, é
Provas
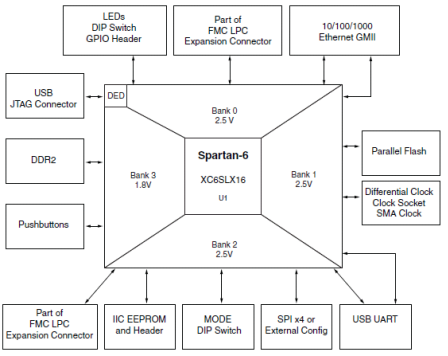
Fonte: kit SP601 - Xilinx
Como pode nele ser observado, o recurso que não está garantidamente presente na placa é que ela
Provas
- EletrotécnicaEletrônica Digital em Eletricidade
- EletrotécnicaInstrumentos e Medições elétricas
- Eletrônica
Nesse caso, o valor esperado da tensão na entrada do conversor e o valor aproximado da maior tensão positiva que o conversor pode representar estão, respectivamente, entre
Provas
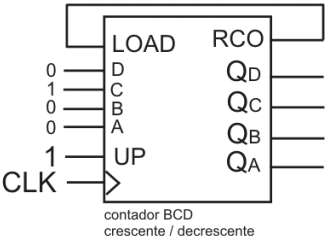
Assinale a opção que indica o número de estados da sequência permanente do contador.
Provas
Caderno Container