Foram encontradas 50 questões.
int X,Y,*Z;
X = 0;
Y = 1;
Z = &Y;
*Z = 2;
Z[1] = 3;
Z = &X;
Z = 4;
printf (“Y =%d”,Y);
O valor de Y que será impresso após a execução do código acima, em linguagem de programação C, é
Provas
Os sistemas operacionais podem ter seus kernels estruturados segundo duas arquiteturas: micro-kernel e kernel monolítico. Sobre elas, é INCORRETO afirmar que
Provas
Considere N a dimensão do vetor A, que contém números inteiros distintos com 9 dígitos. Deseja-se determinar as posições desse vetor nas quais se localizam o maior e o menor número. Estas posições deverão ser armazenadas nas variáveis CMAX e CMIN, respectivamente.
Para isso, utilizou-se o seguinte algoritmo:
CMAX \( \leftarrow \) 1
CMIN \( \leftarrow \) 1
Vaux1 \( \leftarrow \) A(1)
Vaux2 \( \leftarrow \) A(1)
Para J de 2 até N
Se A(J) > Vaux1
_____________
_____________
senão
Se A(J) < Vaux2
_____________
_____________
Fim do se
Fim do se
Fim do para
No algoritmo, as linhas em branco devem ser preenchidas, de cima para baixo, respectivamente, com:
Provas
A tecnologia de rede local Ethernet se refere a uma topologia
Provas
Um sinal de tensão, obtido através de um sensor analógico, tem duração total de 10 s. Este sinal foi digitalizado com uma certa taxa de amostragem e quantizado em 16 bits por amostra. Os dados obtidos na digitalização ocuparam um espaço em memória de 5 Mbytes. Qual foi a taxa de amostragem, em kHz, usada na conversão A/D (Analógica/ Digital)?
Provas
Com relação à arquitetura PC padrão, é INCORRETO afirmar que
Provas
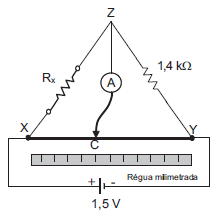
Deseja-se efetuar a medida de uma resistência desconhecida (Rx), improvisando-se o processo mostrado na figura acima. Usa-se uma pilha de 1,5 V alimentando um pedaço de fio resistivo homogêneo de 50 cm esticado ao lado de uma régua milimetrada (segmento XY). Um cursor C mantém contato com o fio resistivo e o amperímetro A indica a presença de corrente entre os pontos Z e C. O método consiste em deslocar o cursor sobre o fio resistivo até zerar a corrente no amperímetro. Feita a experiência, verificouse que a distância YC foi de 35 cm.
O valor de Rx, em \( \Omega \), é:
Provas
Considere a arquitetura implementada a seguir.
entity CONTADOR is
port (CLK, EN, CLR, LOAD, UP: in std_logic;
D: in std_logic_vector (3 downto 0);
Q: out std_logic_vector (3 downto 0));
end CONTADOR;
architecture comportamento of CONTADOR is
signal CONT: std_logic_vector (3 downto 0);
begin
process (CLK)
begin
if (CLK’event and CLK = ‘1’) then
if (CLR = ‘1’) then CONT <= “0000”;
elsif (LOAD = ‘1’) then CONT <= D;
elsif (EN = ‘1’ and UP = ‘1’ and
CONT = “1001”) then
CONT <= “0000”;
elsif (EN = ‘1’ and UP = ‘1’) then
CONT <= CONT + “0001”;
elsif (EN = ‘1’ and UP = ‘0’ and
CONT = “0000”) then
CONT <= “1001”;
elsif (EN = ‘1’ and UP = ‘0’) then
CONT <= CONT - “0001”;
end if;
end if;
end process;
Q <= CONT;
end comportamento;
Esta arquitetura se refere a um contador do tipo
Provas
Considere o modelo de um sistema linear dado pela seguinte representação em espaço de estado:
\( \dot {X} (t) \, = \, \begin {bmatrix} -11 \,\,\,\,\,\,\, -60 \\ 1 \,\,\,\,\,\,\,\,\,\, 5 \end {bmatrix} \, X (t) \, + \, \begin {bmatrix} 1 \\ 0 \end {bmatrix} u (t) \, y(t) \, = \, [1 \,\, 15]X (t) \)
Os polos deste sistema são:
Provas

Considere o sistema de controle em malha fechada ilustrado na figura acima, onde K > 0 representa o ganho a ser ajustado no compensador. Pelo compensador adotado e levando-se em conta o diagrama do lugar das raízes (root locus) desse sistema, conclui-se que o sistema será
Provas
Caderno Container