Foram encontradas 215 questões.
A população P de certa cidade cresce de acordo com a função P(t) = 56.000 · (1,01)t , onde t significa o tempo, em anos. O gráfico que melhor representa essa função é
Provas
Provas
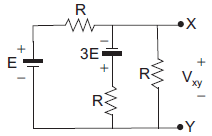
A expressão da tensão Vxy do Equivalente Thevenin entre os pontos X e Y do circuito da figura acima é
Provas
Provas
Disciplina: TI - Organização e Arquitetura dos Computadores
Banca: CESGRANRIO
Orgão: Transpetro
O seguinte pseudocódigo é uma forma simplificada do algoritmo de busca depht first num grafo direcionado. O procedimento principal dfs(N,Adj) recebe como entrada o inteiro N e a matriz Adj, de dimensões NxN. Adj(u,v) representa o elemento da linha u e coluna v da matriz Adj. O procedimento dfs(N,Adj) faz a chamada recursiva do procedimento dfs-visit(u), onde u é um inteiro de 1 a N. Ao término dos dois procedimentos, os vetores cor e b, indexados pelos inteiros u de 1 até N, são preenchidos de acordo com a regra de busca prevista no algoritmo.
dfs(N,Adj)
Para u de 1 até N
cor[u] !$ \leftarrow !$ branco
b[u] !$ \leftarrow !$ 0
Fim-Para
Para u de 1 até N
Se cor[u] = branco
dfs_visit(u)
Fim-Se
Fim-Para
Fim
dfs-visit(u)
cor[u] !$ \leftarrow !$ cinza
Para v de 1 até N
Se (Adj(u,v) = 1) e (cor[v] = branco)
b[v] !$ \leftarrow !$ u
dfs_visit(v)
Fim-Se
Fim-Para
cor[u] !$ \leftarrow !$ preto
Fim
O resultado do vetor b após a aplicação do procedimento principal para N=6
e !$ Adj = \begin{bmatrix} 0 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 1 \\ 0 & 0 & 0 & 0 & 0 & 1 \end{bmatrix} !$
é
Provas
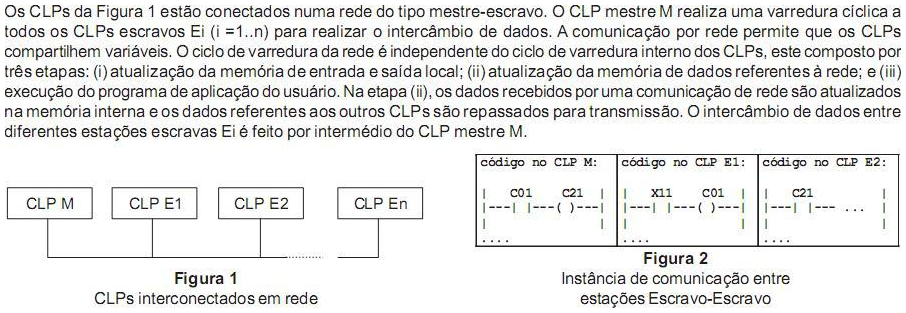
Um dado CLP possui as instruções INT, INIT, RET, END e IORB, descritas a seguir. A colocação da instrução INT no cabeçalho do programa principal no CLP indica o uso da função de interrupção temporizada. Esta função faz com que o fluxo normal de execução do ciclo de varredura seja interrompido a cada 10ms para ser executada uma subrotina iniciada pela instrução INIT e terminada pela instrução RET. A subrotina deve ser inserida imediatamente após o final do programa principal, sendo este sinalizado pela instrução END, conforme ilustrado na Figura 1. Após o término da execução da subrotina, o CLP retorna à execução do programa de aplicação principal no ponto onde foi interrompido, conforme ilustrado na Figura 2. A função de interrupção opera tanto durante a execução do programa principal quanto durante o processo de entrada e saída do CLP. Conseqüentemente, o tempo de execução da subrotina deve ser bem menor que o tempo da interrupção cíclica. A subrotina é comumente usada para realizar entradas e saídas imediatas pelo CLP. Para isso, a instrução IORB executa a atualização imediata do dado a ela associado, podendo este ser um dado de entrada ou de saída.
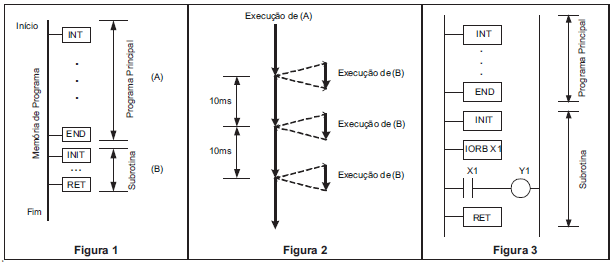
No programa da Figura 3, considere que o tempo de varredura total é de 200ms, o tempo de resposta do ponto de entrada correspondente a X1 é de 10ms, o tempo de resposta do ponto de saída correspondente a Y1 é de 10ms e que o tempo de execução da subrotina é desprezível. O tempo de atraso do CLP para levar uma variação do sinal de entrada correspondente a X1 ao sinal de saída correspondente a Y1 é, em milissegundos, de
Provas
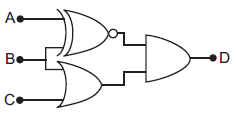
A figura acima apresenta o circuito digital que gera o sinal binário D em função dos sinais A, B e C. O Mapa de Karnaugh do sinal D gerado no circuito é
Provas
As posições dos pólos no plano s da função de transferência deste sistema são
Provas
Provas

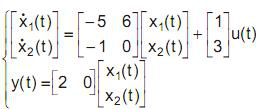
A figura acima apresenta o diagrama de um sistema de controle cujas equações sob a forma de espaço de estado são:
!$ \begin{cases} \dot X(t) = AX(t) + Bu(t) \\ y(t) = CX(t) \end{cases} !$ com a lei de controle !$ u(t) = -KX(t) + Mr(t) !$
onde
!$ A = \begin{bmatrix} 0 & 1\\ -8 & -6 \end{bmatrix} !$ !$ B = \begin{bmatrix} 0 \\ 1 \end{bmatrix} !$ !$ C = \begin{bmatrix} 10 & 0\end{bmatrix} !$ e !$ K = A = \begin{bmatrix} 6 & 3\end{bmatrix} !$
Quando uma entrada r(t) do tipo degrau for aplicada, qual o valor do ganho M para que o erro de estado estacionário seja NULO ?
Provas
Caderno Container