Foram encontradas 658 questões.
O torque necessário para o acionamento de fusos de esfera em sistemas de movimentação linear, como o representado na figura abaixo, é dado por:
!$ T_a=\dfrac{F_al}{2\pi n_1} !$
(desprezando-se a pré-carga da castanha e o torque de resistência do rolamento).
Calcule o torque de acionamento necessário, considerando: o peso total (W1+W2) igual a 1kN; coeficiente de atrito das guias igual a 0,003 e fuso com: diâmetro de 33 mm, avanço de 10 mm e eficiência de 96%.
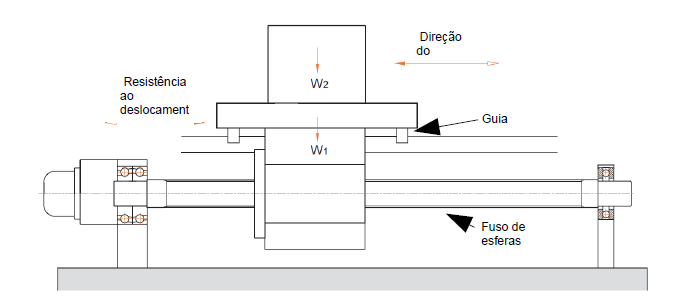
Fonte: adaptado do catálogo “Linear Motion– NSK”.
Provas
Dado um controlador PID (Proporcional-Integral-Derivativo), cuja função de transferência é dada por: C(s)=Kp+Ki/s+Kd.s
Observa-se no ajuste dos parâmetros Kp, Ki, Kd do controlador que:
I. Ao acionar a ação integradora (Ki > 0) garante-se resposta com erro nulo em regime permanente, independente da magnitude de Ki.
II. Ao aumentar o valor da ação proporcional (Kp), consegue-se estabilizar o sistema, reduzindo possíveis oscilações na resposta.
III. A ação derivativa (Kd) pode ser acionada para corrigir o erro em regime permanente, sem conseguir zerá-lo.
Sobre as afirmações acima, pode-se dizer que:
Provas
A partir das seguintes afirmações sobre sensores e transdutores para medição de posição:
I. Os potenciômetros, fabricados em diversos tamanhos e formatos, podem ser utilizados como sensores de posição;
II. Os encoders incrementais são dispositivos utilizados para medir posição ou velocidade angular e sua resolução é dada pelo número de pulsos por revolução;
III. O transformador diferencial linear variável (LVDT, do inglês Linear Variable Differential Transformer) é um transdutor de deslocamento utilizado, por exemplo, em válvulas proporcionais pneumáticas.
Pode-se afirmar que
Provas
Considere o manipulador planar representado na figura abaixo. D e θ representam as variáveis de junta prismática e rotacional, respectivamente. A posição do efetuador final, montado na extremidade do elo 2 é definida pelo ponto P( x , y) .
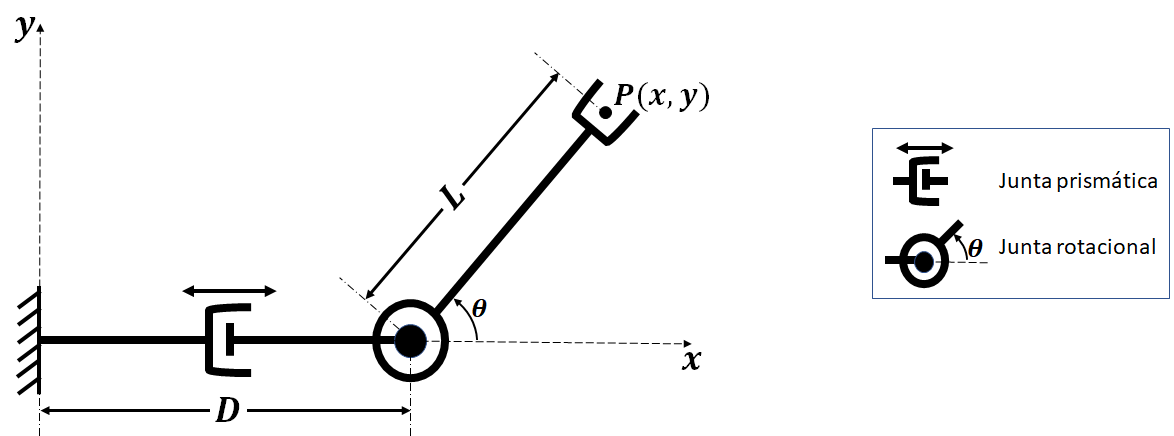
Assinale a alternativa que representa o conjunto de equações referentes às coordenadas do ponto P( x , y) , determinadas em relação ao sistema de referência cartesiano Ox y .
Provas
Com relação aos elementos de máquinas, numere corretamente a coluna da direita de acordo com o texto correspondente à coluna da esquerda:
(1) Utilizada na transmissão de movimento entre eixos perpendiculares entre si.
(2) Podem ser de tração, de compressão, de fita, e de torção.
(3) Também conhecida como meia-lua ou de disco.
(4) Sua função é manter fixo ou limitar movimento axial entre um eixo e outras peças numa montagem
(5) Transmitem o torque necessário e posicionam concêntrica a ferramenta, com relação ao fuso da máquina.
(6) Aplicação muito recomendada em máquinas ou equipamentos que funcionam sob vibrações constantes e/ou intermitentes.
( ) Chaveta woodruff
( ) Anel de retenção
( ) Mola mecânica
( ) Arruela de pressão
( ) Engrenagem cônica
( ) Porta-ferramenta
A ordem CORRETA de associação, de cima para baixo, é:
Provas
Equipamentos e/ou dispositivos mecatrônicos utilizam sistemas de transmissão de movimento e potência. Das alternativas apresentadas abaixo, assinale a que cita apenas exemplos de sistemas de transmissão de movimento e potência utilizados em equipamentos mecatrônicos:
Provas
A figura apresentada a seguir é um circuito eletropneumático constituído de dois atuadores para a execução de uma determinada tarefa. Analise o circuito e marque (V) para as afirmativas verdadeiras e (F), para as falsas.
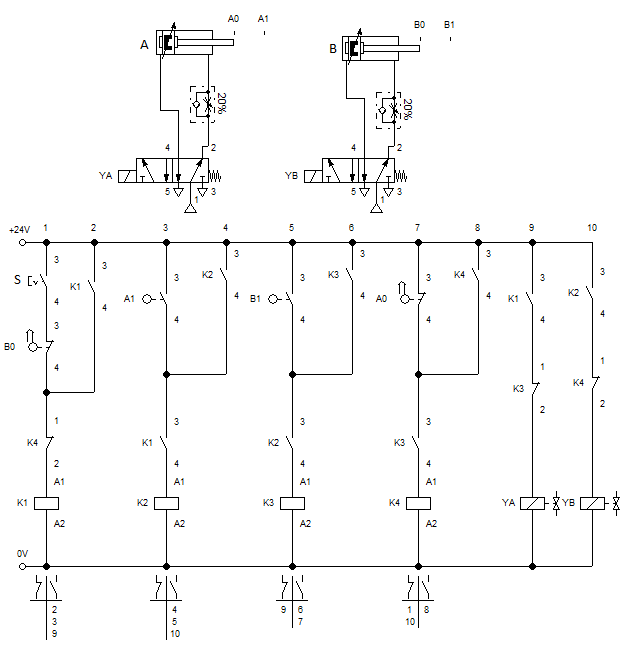
( ) A ativação do relé K2 faz o atuador B recuar.
( ) A movimentação dos atuadores é de acordo com a seguinte sequência algébrica: A+ B+ (A- B-)
( ) Os sensores A1 e B1, são pré-condições de ativação dos relés K2 e K3, respectivamente.
( ) A condição para iniciar a movimentação do sistema é que o atuador A esteja recolhido (sensor A0 ativado) e o botão S seja pressionado.
( ) A ativação do relé K4 faz o atuador B avançar.
( ) O circuito eletropneumático foi feito com base no método denominado Cadeia Estacionária.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Provas
Analise o circuito abaixo e assinale as alternativas corretas.
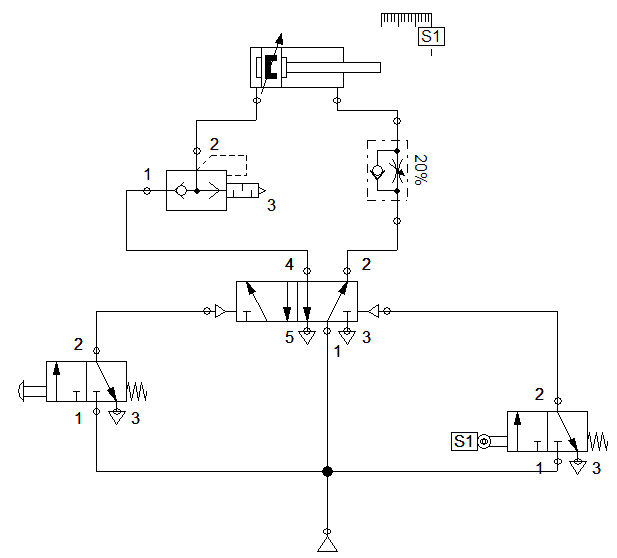
( ) O atuador avança rápido e retorna lento por causa das válvulas de escape rápido e da válvula reguladora de vazão.
( ) Quando a haste do atuador atinge o rolete S1, ocorre o retorno automático.
( ) Durante o recuo do cilindro, o ar entra na válvula de escape rápido pela via 2 e sai pela via 1.
( ) A válvula reguladora de vazão instalada controla a velocidade do cilindro no avanço e no recuo.
( ) Ao comandar a válvula 3/2 vias de botão, o ar que entra na via 1 da válvula, sai na via 2, acionando o piloto da válvula direcional 5/2 vias. Com isso o cilindro avança.
( ) O atuador apresentado no sistema possui duplo amortecimento regulável.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Provas
Qual é nome mais utilizado para o circuito elétrico da Figura XX?
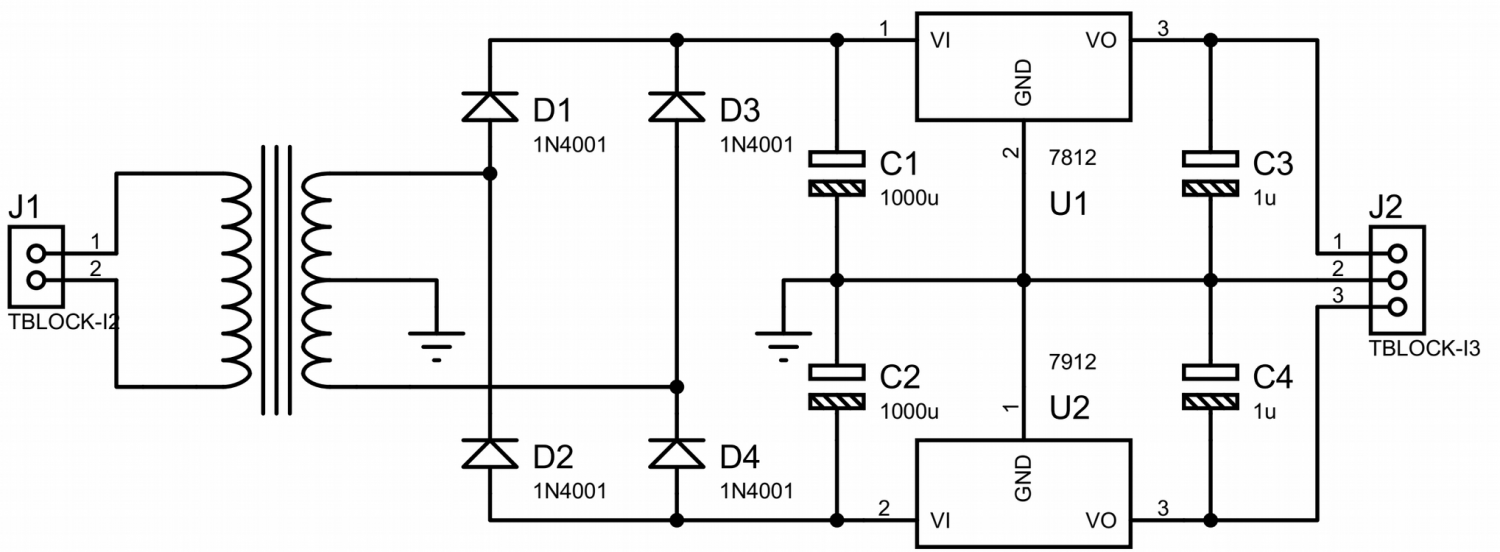
Figura XX.
Provas
Provas
Caderno Container