Foram encontradas 580 questões.
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Provas
Questão presente nas seguintes provas
Considere o diagrama de blocos da figura a seguir.
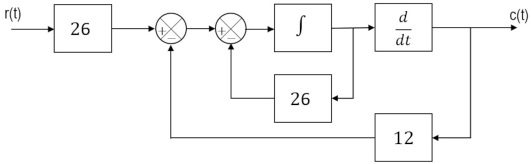
A função de transferência \( \dfrac{C(s)}{R(s)} \) do sistema representado por esse diagrama é dada por:
Provas
Questão presente nas seguintes provas
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da massa m é a saída do sistema. Esse deslocamento é medido a partir da posição de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da mola (quando a massa é pendurada na mola), k é a constante de elasticidade da mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
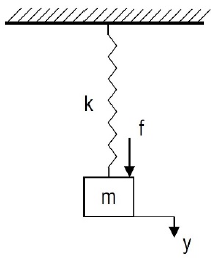
Assinale a alternativa que contém a função de transferência do sistema.
Provas
Questão presente nas seguintes provas
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Provas
Questão presente nas seguintes provas
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Provas
Questão presente nas seguintes provas
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
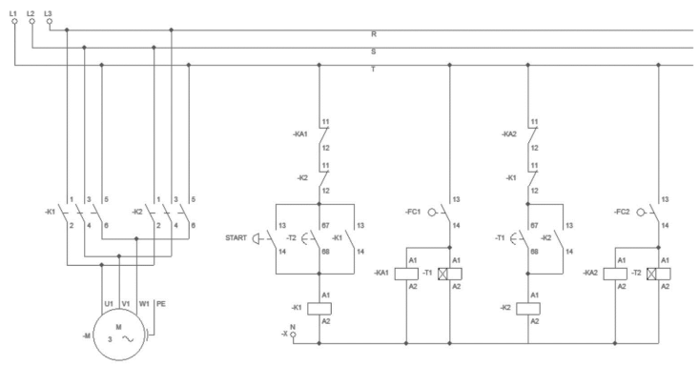
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Provas
Questão presente nas seguintes provas
Bobinas virtuais, também conhecidas como marcadores, são um importante recurso disponível em diversos
controladores lógicos programáveis. O diagrama Ladder a seguir ilustra a aplicação de uma delas, identificada
como M01. Neste diagrama, letras minúsculas e maiúsculas são utilizadas para diferenciar contatos normalmente
abertos de contatos normalmente fechados. 
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Provas
Questão presente nas seguintes provas
Levando em consideração os conhecimentos sobre os problemas ambientais, é correto afirmar:
Provas
Questão presente nas seguintes provas
De acordo com a Lei n.º 12.651, de 25 de maio de 2012, que dispõe sobre a proteção da vegetação nativa, é correto
afirmar:
Provas
Questão presente nas seguintes provas
Com relação a conservação e gerenciamento de solos agrícolas, é correto afirmar que a perda de solo pode ser
intensificada por diversos fatores. Assinale a alternativa que corresponde a um desses fatores.
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container