Foram encontradas 35 questões.
Acerca do histórico e do perfil institucional do IFPR, conforme consta do Plano de Desenvolvimento Institucional do
IFPR, é correto afirmar que o IFPR:
Provas
Questão presente nas seguintes provas
Qual das seguintes alternativas descreve uma desvantagem do uso de automação eletropneumática em
processos industriais?
Provas
Questão presente nas seguintes provas
Um motor de indução trifásico (MIT) 220 V, 60 Hz, 6 polos, ligado em Y, possui os seguintes parâmetros elétricos
referentes ao circuito equivalente por fase, como pode ser visto na figura a seguir, em que:
R1 = 0,4 Ω X1 = 0,6 Ω R2 = 0,15 Ω X2 = 0,3 Ω Xmag = 15 Ω
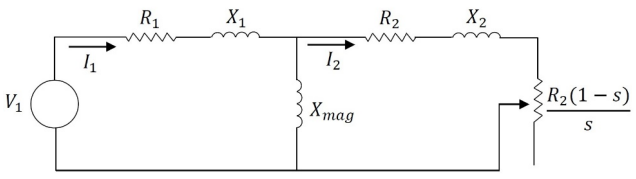
Em determinada aplicação, o MIT opera com 5% de escorregamento e I2 igual a 10 A. Considerando que as perdas totais de atrito, ventilação e rotacionais suplementares sejam de 120 W constantes, independentemente da carga, a potência de saída do motor é de aproximadamente:
R1 = 0,4 Ω X1 = 0,6 Ω R2 = 0,15 Ω X2 = 0,3 Ω Xmag = 15 Ω
Em determinada aplicação, o MIT opera com 5% de escorregamento e I2 igual a 10 A. Considerando que as perdas totais de atrito, ventilação e rotacionais suplementares sejam de 120 W constantes, independentemente da carga, a potência de saída do motor é de aproximadamente:
Provas
Questão presente nas seguintes provas
Qual é a função de um atuador em um robô?
Provas
Questão presente nas seguintes provas
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Provas
Questão presente nas seguintes provas
Considere o diagrama de blocos da figura a seguir.
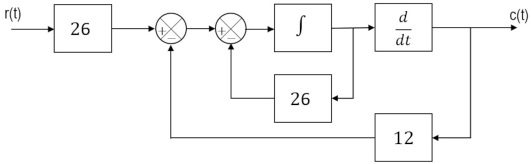
A função de transferência \( \dfrac{C(s)}{R(s)} \) do sistema representado por esse diagrama é dada por:
Provas
Questão presente nas seguintes provas
Considere o sistema mecânico da figura ao lado. O deslocamento vertical y da massa m é a saída do sistema. Esse deslocamento é medido a partir da posição de equilíbrio do sistema, ou seja, kδ = mg, em que δ é a deflexão estática da mola (quando a massa é pendurada na mola), k é a constante de elasticidade da mola, e g é a aceleração da gravidade. O sistema encontra-se em repouso para t < 0. Em t = 0, uma força externa f é aplicada ao sistema.
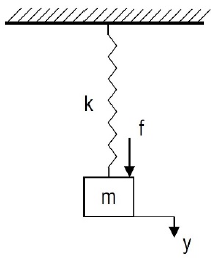
Assinale a alternativa que contém a função de transferência do sistema.
Provas
Questão presente nas seguintes provas
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Provas
Questão presente nas seguintes provas
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Provas
Questão presente nas seguintes provas
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
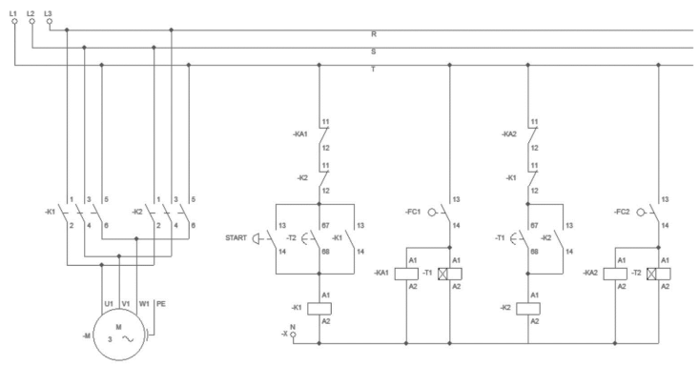
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container