Foram encontradas 658 questões.
Provas
Considere o diagrama Ladder abaixo com entradas digitais X1, X2, X3 e saídas digitais Y1, Y2, Y3
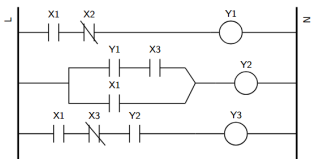
Analise os itens a seguir:
I. Se X1 = 1 e X3 = 0, então a saída Y3 será acionada independentemente do valor de X2.
II. Se X2 = 1, a saída Y1 estará necessariamente desligada.
III. A saída Y2 só pode ser acionada se pelo menos uma das saídas Y1 ou Y3 estiver acionada.
IV. A saída Y3 só será acionada se a saída Y2 também estiver acionada.
Está correto o que se afirma em
Provas
Considere o sistema de controle em malha fechada a seguir.
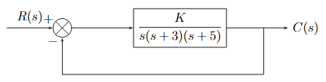
É correto afirmar que o sistema
Provas
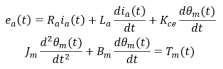
A dinâmica aproximada de uma junta de robô é descrita por:
![]()
com os parâmetros numéricos:
![]()
Assinale a opção correta.
Provas
A velocidade aproximada do rotor é
Provas
Considere o modelo de um motor CC com excitação independente:
Analise os itens a seguir:
I. A constante Kce relaciona a velocidade de rotação com a força contra-eletromotriz.
II. O aumento do atrito viscoso Bm reduz a velocidade de regime de armadura.
III. O torque eletromagnético é diretamente proporcional à corrente de armadura.
Está correto o que se afirma em
Provas
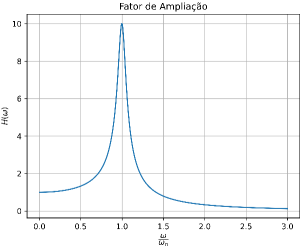
Ao se analisar esse gráfico, é correto concluir que
Provas
Considerando-se que a maior razão de transmissão admissível para um par de engrenagens é de 10:1, assinale a opção que se mostra mais viável.
Provas
Assinale a opção que apresenta o número de atuadores que são necessários para movimentar esse robô de modo previsível e controlado.
Provas
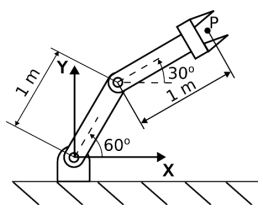
Considerando que os elos móveis possuem comprimentos iguais a 1 m, obtenha a cinemática direta, ou seja, a posição do efetuador, ponto P, em coordenadas cartesianas para o instante mostrado na figura.
Provas
Caderno Container