Foram encontradas 773 questões.
Nas entradas e na saída de um Controlador Lógico Programável (CLP) estão conectados os seguintes componentes:
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:

Analisando-se o programa, constata-se que o sistema em
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
Analisando-se o programa, constata-se que o sistema em
Provas
Questão presente nas seguintes provas
Os esquemas pneumático e elétrico de controle de um determinado dispositivo eletropneumático são mostrados abaixo.
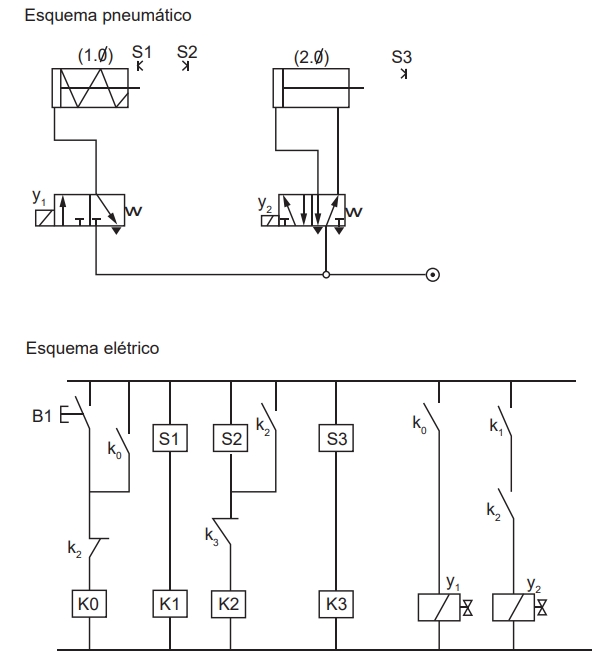
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Provas
Questão presente nas seguintes provas
- Robótica e Automação
- Análise e Controle de Sistemas
- Automação Industrial para Engenharia de Automação
Dentro da indústria de manufatura, a programação offline (OLP) tem se tornado uma prática
comum na programação de robôs. Com relação à
OLP, qual das seguintes afirmações é verdadeira?
Provas
Questão presente nas seguintes provas
Em uma fábrica de eletrônicos, um robô industrial é utilizado para a montagem de placas de
circuito. A velocidade e a precisão do robô são essenciais para garantir a qualidade do produto e otimizar a produção. Nesse contexto, o acionamento
por servomecanismo é fundamental.
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Provas
Questão presente nas seguintes provas
Em uma indústria petroquímica, um tanque
de reação química é controlado por um sistema
PID. O controlador é responsável por manter o nível do líquido do tanque dentro de certos limites
pré-definidos. Um operador observou que, apesar
do nível do líquido se estabilizar corretamente no
ponto desejado, há uma oscilação persistente em
torno desse ponto.
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Provas
Questão presente nas seguintes provas
Em um sistema de logística, um robô é utilizado para direcionar pacotes para diferentes destinos com base em um código de barras presente em
cada pacote. O robô funciona com uma máquina
de estados com quatro estados: S0, S1, S2 e S3,
que representam diferentes destinos. A lógica da
máquina de estados é:
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Provas
Questão presente nas seguintes provas
Assinale a alternativa correta em relação às redes
industriais e suas características.
Provas
Questão presente nas seguintes provas
Qual é a função de um atuador em um robô?
Provas
Questão presente nas seguintes provas
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Provas
Questão presente nas seguintes provas
Considere o diagrama de blocos da figura a seguir.
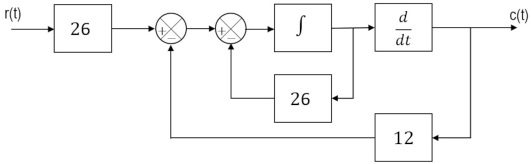
A função de transferência \( \dfrac{C(s)}{R(s)} \) do sistema representado por esse diagrama é dada por:
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container