Foram encontradas 658 questões.
Sobre as linhas de produção automatizadas, é INCORRETO afirmar que:
Provas
Abaixo são apresentadas três características sobre sistemas de controle contínuo:
I. Neste tipo de controle, o objetivo é manter o desempenho do processo em certo nível ou dentro de uma faixa de tolerância deste nível. Uma ação de compensação é tomada apenas depois que uma perturbação já afetou a saída do processo.
II. Esta estratégia de controle busca antecipar o efeito de perturbações que vão prejudicar o processo fazendo seu sensoriamento e compensando-as antes que elas possam afetar o processo.
III. Este sistema combina o controle por realimentação e o controle otimizado medindo as variáveis relevantes do processo durante a operação e usando um algoritmo que tenta otimizar algum índice de desempenho.
A alternativa que contém os respectivos sistemas de controle de que tratam as características em sequência é:
Provas
A figura abaixo apresenta os cinco níveis de automação e controle na produção. Leia as afirmativas expostas abaixo sobre os níveis:
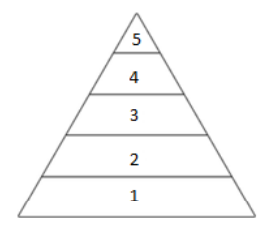
I. O nível 1 compreende sensores, atuadores e outros elementos de hardware incluídos no nível da máquina.
II. O nível 2 é chamado de nível da célula. Uma célula é um grupo de máquinas ou estações de trabalho conectadas e apoiadas por um sistema de manuseio de materiais, um computador ou outro equipamento apropriado ao processo de produção.
III. O nível 3 recebe instruções do sistema de informações corporativas e as traduz em planos operacionais para a produção.
IV. O nível 5 é chamado de nível do empreendimento, e se preocupa com todas as funções necessárias ao gerenciamento da empresa.
Assinale a alternativa em que todas as afirmativas estão CORRETAS.
Provas
Assinale a alternativa CORRETA sobre os barramentos do tipo CAN (Controller Area Network).
Provas
Assinale a alternativa INCORRETA sobre os protocolos de acesso múltiplo ALOHA puro e ALOHA slotted:
Provas
O método de localização e orientação de um robô móvel apenas a partir de informações de sensores proprioceptivos e IMU, sendo conhecida a posição inicial deste, é denominado:
Provas
Assinale a opção que apresenta os três níveis de programação de robôs:
Provas
Em relação à programação de robôs, assinale a alternativa que contém a afirmativa INCORRETA:
Provas
Embora o controle PID (Proporcional, Integral, Derivativo) seja muito usado em regulação, eles não são adequados para o seguimento de trajetórias, devido às características dinâmicas dos manipuladores, com grande grau de acoplamento e não linearidades. Para viabilizar o uso de PID nesses casos, deve-se empregá-lo como parte de controladores baseados em modelo. Assinale a alternativa que contém apenas técnicas baseadas no modelo dinâmico.
Provas
Considere as afirmativas abaixo sobre singularidades em manipuladores.
I. Em uma configuração singular, o manipulador perde um ou mais graus de liberdade.
II. Próximo a uma singularidade, um pequeno movimento do efetuador final resulta em grandes acelerações nas juntas.
III. Em singularidades, a matriz Jacobiana deixa de ter posto completo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
Caderno Container