Foram encontradas 658 questões.
Os dois problemas inerentes à dinâmica de manipuladores são a dinâmica direta e a dinâmica inversa. As afirmações abaixo correspondem à aplicações de cada tipo de problema. Assinale a alternativa que descreve CORRETAMENTE o tipo de problema na ordem que se apresenta (I, II, III, IV).
I. Implementação de algoritmos de controle do manipulador.
II. Determinação dos torques necessários para gerar o movimento especificado nas juntas, conhecidos os esforços exercidos no efetuador final por contato com o ambiente.
III. Determinação das acelerações causadas pelos esforços no manipulador, uma vez conhecida a configuração inicial deste.
IV. Simulação de sistemas dinâmicos de manipuladores.
Provas
Em relação à redundância cinemática em robôs manipuladores, é INCORRETO afirmar:
Provas
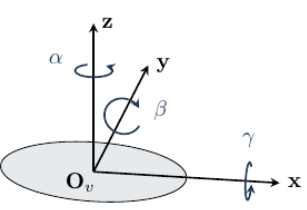
Seja o corpo rígido mostrado abaixo, com um sistema de coordenadas a ele vinculado. Considerando que os ângulos α, β e γ são ângulos de Euler, assinale a alternativa que os nomeia corretamente na ordem α – β – γ
Provas
Em relação às afirmativas abaixo sobre o Jacobiano, em robótica, assinale a alternativa em que todas as afirmativas estão CORRETAS:
I. O Jacobiano expressa o relacionamento entre as velocidades das juntas e a velocidade do efetuador final de um manipulador serial.
II. O Jacobiano relaciona as forças e momentos aplicados no efetuador final aos torques nas juntas do manipulador serial.
III. A matriz Jacobiana de robôs manipuladores só pode ser quadrada ou do contrário o manipulador tem singularidade de representação.
IV. O Jacobiano pode ser usado para determinar numericamente a cinemática inversa de posição.
Provas
Marque a alternativa que expressa corretamente às equações de movimento no espaço das juntas segundo o formalismo de Euler-Lagrange, sendo q o vetor de variáveis independentes, k a energia cinética, u a energia potencial, L o Lagrangeano e τ o torque:
Provas
Assinale a alternativa INCORRETA em relação aos TERMOPARES.
Provas
Em relação ao protocolo de comunicação Modbus RTU (Remote Terminal Unit, ou Unidade Terminal Remota), assinale a alternativa INCORRETA.
Provas
A norma IEC 61131 define que para um CLP - Controlador Lógico Programável estar de acordo com os padrões por ela estabelecidos, deve possuir ao menos duas linguagens gráficas e duas linguagens de texto para sua programação. Assinale a alternativa que possui uma linguagem de programação não padronizada.
Provas
Em 1992, a International Electrotechnical Commission (IEC — Comissão Internacional de Eletrotécnica) publicou a primeira edição da norma IEC 61131, com o objetivo de estabelecer padrões para os controladores programáveis. Essa norma foi dividida em vários capítulos, possibilitando a definição de critérios para cada um dos tópicos relacionados aos CLPs. Assinale a alternativa CORRETA em relação aos conteúdos dessa norma.
Provas
Disciplina: Engenharia Mecatrônica
Banca: CESGRANRIO
Orgão: BR Distribuidora
A elevação de uma carga de 1,5 kN é realizada por um circuito hidráulico que utiliza um atuador linear cuja área do pistão é de 20 cm2. Um manômetro é instalado na linha do circuito para monitorar a pressão.
Nas condições de elevação da carga a uma velocidade constante e desprezando-se as perdas de carga na linha, a indicação da pressão do manômetro, em kPa, é de
Provas
Caderno Container