Foram encontradas 40 questões.
Sobre funções disponíveis em painéis controle de centros de usinagem CNC com comando FANUC, assinale as afirmações verdadeiras com (V) e as falsas com (F).
( ) A função SINGLE BLOCK permite a execução de um bloco cada vez que o botão CYCLE START é pressionado.
( ) A função DRYRUN desabilita a aspersão de fluido de corte durante a usinagem.
( ) A função OPTIONAL STOP interrompe temporariamente a execução de um programa quando a função M01 é lida em um bloco do programa.
( ) A função BLOCK SKIP ignora blocos precedidos por uma barra (/) no programa.
( ) A função RESET permite o teste de programas sem movimentação dos eixos, eixo árvore (spindle) e trocas de ferramentas.
Assinale a alternativa que apresenta a sequência CORRETA de cima para baixo.
Provas
O controlador do tipo ON-OFF, ou liga-desliga, é simples e econômico, sendo utilizado largamente em diversas aplicações. Possui apenas duas posições de controle, baseadas no valor do erro E(s), sendo a ação de controle do sistema ligada ou desligada, conforme mostra o gráfico a seguir:
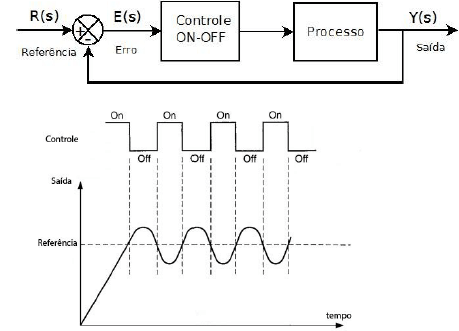
Com base nessas informações, avalie as afirmativas que se referem às características do sistema, quando controlado através de um ON-OFF.
I. Quanto mais estreito o intervalo entre as duas posições, maior é a frequência de ciclo. Geralmente, uma elevada taxa de ciclo não é desejada devido a desgastes por excessivos chaveamentos no sistema de controle.
II. A correção no controle depende da intensidade do erro, ou seja, a atuação de controle será proporcional ao erro no sistema.
III. A ação de controle sempre deixa um erro residual, conhecido por offset, no sinal de saída do sistema.
IV. Uma maneira de reduzir os chaveamentos e oscilações é incluir uma histerese em torno da referência desejada. Nesse caso, o sistema fica oscilando entre um valor máximo e um valor mínimo de uma zona morta. Entre os extremos, o sistema segue a própria dinâmica uma vez que não há atuação de controle no intervalo da zona morta.
Assinale a alternativa que contém as afirmativas VERDADEIRAS.
Provas
Considere um servomotor CC, cuja velocidade de rotação !$ \omega_m !$ é comandada pelo circuito de armadura, através da tensão Va, conforme mostra a figura abaixo:
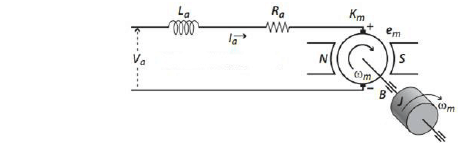
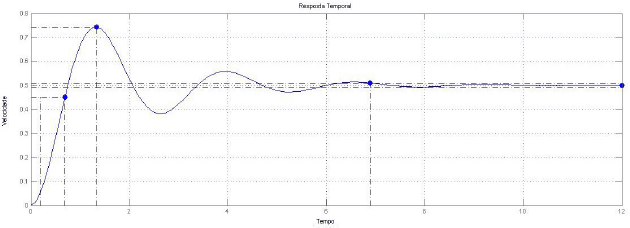
Sendo aplicada à entrada do sistema uma tensão de armadura Va de 1 Volt, obteve-se a seguinte resposta da velocidade de rotação !$ \omega_m !$ no tempo, dado em segundos.
Com base no gráfico da resposta temporal, avalie as afirmativas.
I. O sistema pode ser considerado de segunda ordem, subamortecido, com sobressinal estimado em 50%.
II. O tempo de acomodação do sistema pode ser estimado em 1s.
III. O sistema possui apenas um pólo real, com tempo de acomodação de 7s.
IV. O sistema é de segunda ordem, sobreamortecido, atingindo o regime em 12s.
V. O valor de regime permanente do sistema é de 0,5.
Assinale a alternativa que contém as afirmativas CORRETAS.
Provas
Os sistemas CAM voltados ao torneamento e fresamento CNC apresentam recursos de simulação que auxiliam programadores a evitar situações indesejáveis durante a usinagem. Assinale a alternativa abaixo NÃO contemplada nos atuais Sistemas CAM comerciais.
Provas
Os comandos e funções utilizados na programação de máquinas CNC são chamados de modais quando uma vez programados permanecem ativos na memória do comando. Assinale a alternativa abaixo que NÃO contém um comando ou função modal.
Provas
Considerando a cadeia cinemática do manipulador RR no espaço:
O ponto considerado para a determinação desta cinemática inversa é a origem do sistema cartesiano 2 com suas coordenadas em relação ao sistema cartesiano da base do manipulador 0x0y0z0: 002(x,y,z).
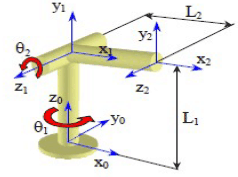
Assinale a alternativa que representa o conjunto de equações referente às variáveis de junta do manipulador q = [ϴ1 , ϴ2]T que representa a CORRETA cinemática inversa desse manipulador.
Provas
Considerando a cadeia cinemática do manipulador planar RR:
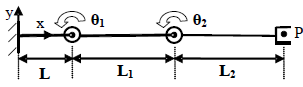
Assinale a alternativa que define o conjunto de equações, referente às coordenadas do ponto central da garra P(px,py) em relação ao sistema de referência cartesiano 0xy, e que representa a CORRETA cinemática direta de posição deste manipulador.
Provas
Uma das juntas rotacionais de um robô, com resolução angular de 0,001 graus, é acionada por um servo motor via transmissão mecânica planetária de redução 720:1. O servo driver que controla a posição angular dessa junta rotacional está parametrizado para contar ambas as transições (borda de subida e borda de descida) dos pulsos elétricos gerados pelos canais A e B, em quadratura do encoder incremental ótico.
Assinale a alternativa que informa o CORRETO número de pulsos por revolução (ppr) de cada canal ou o número de linhas do encoder que se encontra acoplado diretamente ao rotor do servo motor.
Provas
Considerando apenas as três primeiras juntas rotacionais (base, ombro e cotovelo) de um típico robô antropomórfico industrial, assinale a alternativa que informa a CORRETA quantidade de graus de mobilidade e de liberdade, respectivamente, dessa cadeia cinemática RRR.
Provas
A tecnologia de comando numérico, como é conhecida na atualidade, surgiu durante os anos 50, a partir de uma iniciativa tripartite. Assinale a alternativa CORRETA que lista as 3 empresas envolvidas na criação do sistema de comando numérico.
Provas
Caderno Container