Foram encontradas 1.668 questões.
Como é chamado o ensaio de dureza no qual é utilizada uma esfera de 10 mm de diâmetro e aplicada uma carga igual a 3.000 kgf durante 15 a 60 segundos? Assinale a alternativa que responde CORRETAMENTE à questão acima.
Provas
Um determinado servossistema precisa ser controlado. Analisando o comportamento do servossistema, observa-se que este pode ser modelado pela equação diferencial ordinária (EDO):
!$ { \large d^2 u(t) \over dt^2} + 3 { \large du(t) \over dt} + 5u(t) = { \large d^3 v(t) \over dt^3} +15 { \large d^2 v(t) \over dt^2} + 7 { \large dv(t) \over dt} + 18 v(t) !$
Considerando como variável controlada o sinal de saída v(t) e como variável manipulada o sinal de entrada u(t), assinale abaixo a alternativa que corresponde CORRETAMENTE à função de transferência G(s) = V(s)/U(s) para esse servossistema que pode ser obtida pela transformada de Laplace da EDO.
Provas
Para identificar o modelo de um processo real de uma indústria, aplicou-se o teste de reação a um sinal de entrada do tipo degrau. Foi aplicado na entrada um degrau de 10V e obtida a curva de resposta da saída no tempo, através de um osciloscópio, dada pela figura a seguir.
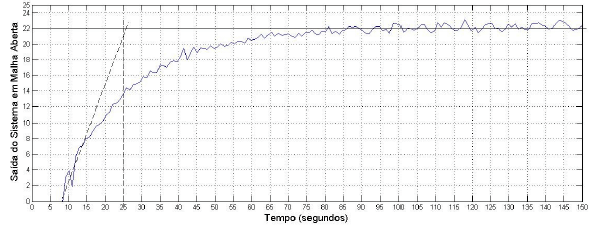
Analisando a curva da resposta, pode-se obter a função de transferência de malha aberta através do método Ziegler-Nichols. Com base nessas informações, assinale a alternativa CORRETA.
Provas
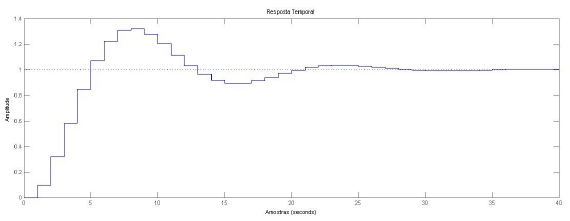
Considere um sistema de controle digital, em que o processo contínuo em malha aberta P(s) é discretizado, usando um ZOH – zero order hold, ou seja, um segurador de ordem zero, com tempo de amostragem de 0.5 segundo. Ao se aplicar um controlador PID digital, ajustam-se os três ganhos de controle Kp, Ki, Kd, obtendo duas diferentes respostas no sistema controlado conforme as figuras I e II.

Onde:
!$ PID(z) = Kp +Ki.(1 -z^{-1})^{-1} + Kd. (1 - z^{-1})\,\,P(s) = 1/(s^2 + 2s +1) !$
Curva de Resposta I:
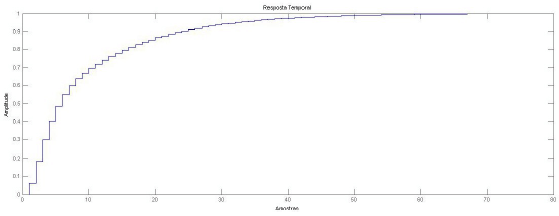
Curva de Resposta II:
Considerando as respostas obtidas pelos dois ajustes de controlador PID digital, assinale as sentenças verdadeiras com (V) e as falsas com (F).
( ) Para obter a resposta II a partir da resposta I, uma possibilidade é pela redução do ganho integral Ki do controlador PID, diminuindo a oscilação do sistema.
( ) Para obter a resposta II a partir da resposta I, aumentou-se o ganho integral Ki do controlador PID, reduzindo a oscilação do sistema e garantindo erro nulo em regime.
( ) Em ambas as respostas, o ganho integral Ki no PID digital é zero, pois o processo P(s) possui erro de regime permanente nulo em malha aberta.
( ) Na resposta II, o sistema ficou mais lento, podendo o ajuste ter sido feito pelo aumento do ganho derivativo Kd, o que resultaria na diminuição de oscilações quando comparado ao ajuste da resposta I.
( ) Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, pode-se afirmar que o sistema de controle ajustado para a resposta I é aproximadamente duas vezes mais rápido que o ajuste do controle da resposta II.
Assinale a alternativa que apresenta a sequência CORRETA de cima para baixo.
Provas
Para o dado manipulador planar com cadeia cinemática PR.
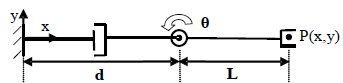
Assinale a alternativa que representa a CORRETA cinemática diferencial, em termos da matriz jacobiana inversa desse manipulador.
Provas
Dado o diagrama de blocos:
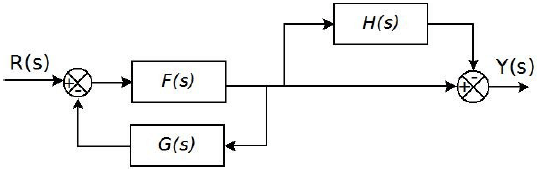
Assinale a alternativa com a função de transferência que representa Y(s)/R(s).
Provas
Considere um processo em malha aberta, dado pela função de transferência:
!$ { \Large {G(S) =}} { \Large { 1 \over S (2s + 18)}} !$
Para esse processo, realimenta-se uma malha de controle, usando um controlador proporcional de ganho Kp, conforme representado no diagrama de blocos a seguir:

A respeito do erro em regime permanente (Ereg) do sistema em malha fechada, assinale a alternativa CORRETA.
Provas
Considerando a cadeia cinemática do manipulador planar RR:
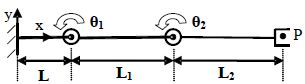
Qual o conjunto de equações, referente às coordenadas do ponto central da garra P(px,py) em relação ao sistema de referência cartesiano 0xy que representa a CORRETA cinemática direta de posição deste manipulador?
Assinale a alternativa que responde CORRETAMENTE à questão acima.
Provas
Assinale a alternativa CORRETA com relação ao cálculo de trajetórias em Sistemas CAM.
Provas
Sobre estratégias de usinagem disponíveis em sistemas CAM para fresamento, assinale as afirmações verdadeiras com (V) e as falsas com (F).
( ) A operação de desbaste a partir de blocos brutos utiliza movimentações em 2 ½ eixos com objetivo de remover a maior quantidade de material antes de atingir a forma final da peça.
( ) O alívio de cantos é uma operação de pré-acabamento que emprega ferramentas com diâmetro maior que as utilizadas no desbaste.
( ) O acabamento através de passes paralelos horizontalmente constantes é adequado para usinagem de peças com muitas regiões com superfícies verticais.
( ) A operação de remoção de degraus, disponível em alguns sistemas CAM, emprega um algoritmo que identifica excessos de material deixados na operação de acabamento.
( ) Diversos sistemas CAM empregam o uso de fronteiras (boundaries) como recurso para limitar a região a ser usinada em operações de acabamento.
Assinale a alternativa que apresenta a sequência CORRETA de cima para baixo.
Provas
Caderno Container