Foram encontradas 45 questões.
Aplicações de assimilação de dados em oceanografia produzem análises e previsões de diferentes variáveis que caracterizam o estado dos oceanos. O Escritório de Meteorologia do Reino Unido, mais conhecido como Met Office, utiliza um modelo oceanográfico global, chamado Forecasting Ocean Assimilation Model (FOAM), na implementação de um esquema de assimilação variacional tridimensional, conhecido como NEMOVAR.
Entre as variáveis que fazem parte do vetor de estados utilizado no NEMOVAR, encontram-se
Provas
Foi ajustado um modelo para prever a precipitação média mensal de chuvas para determinada região em função da temperatura média mensal \( \overline{(T)} \) e da umidade média mensal \( \overline{(U)} \).
Suponha que o seguinte modelo foi obtido:
\( \overline{P}=30,5 + \overline{T}+3\overline{U} \)
Supondo que o desvio padrão da temperatura média mensal é igual a 5 e o desvio padrão da umidade média mensal é igual a 4. A propagação dos erros da precipitação média mensal é
Provas
Em assimilação variacional, frequentemente são encontrados problemas inversos mal-postos, (ill-posed problems). Esses problemas podem ser convertidos em bem-postos (well-posed) pelo uso de técnicas de regularização. Um exemplo é o uso da regularização de Tikhonov, em que se adiciona um termo de regularização a um funcional a ser minimizado, evitando-se assim instabilidades numéricas durante o cálculo da solução.
Por exemplo: suponha que se busque um vetor x que resolva o sistema \( Hx = y \), minimizando-se o funcional
\( J=||H_x - y||\dfrac{2}{2} \),
em que \( ||\cdot||_2 \) é a norma \( L^2 \) (isto é, um problema de mínimos quadrados mal-posto). Pode-se adicionar o termo de regularização de Tikhonov ao funcional, substituindo-o por
\( J_\alpha ||H_x - y||\dfrac{2}{2}+||\Gamma x ||\dfrac{2}{2} \),
em que \( \Gamma = \alpha I \), e \( I \) é a matriz identidade.
Considere um caso hipotético onde as variáveis \( H \), \( y \) e \( \alpha \) possuem os seguintes valores:
\( H=\begin{bmatrix} 1&2\\2&2\\1&2\\1&2 \end{bmatrix},y=\begin{bmatrix}-1\\0\\1\\2 \end{bmatrix},\alpha = 1 \).
Neste caso, o vetor \( x \) que minimiza \( J_\alpha \) é:
Provas
Filtros de partículas são, em geral, implementados com o uso de reamostragem sequencial por importância. Essa reamostragem pode ser adaptativa, ocorrendo apenas quando a métrica denominada número efetivo de partículas é considerada muito baixa.
Considerando um filtro de partículas com \( N \) partículas cujos pesos são dados por \( w(i),i=1,...,N \), a estimativa do número efetivo de partículas é dada por
Provas
Considere o modelo não linear e o Filtro de Kalman por Conjunto (EnKF) detalhados na questão 04. Para garantir estimativas de covariâncias não enviesadas, a matriz B pode ser calculada pela expressão:
Provas
Seja um modelo não linear dado por:
\( x_k = M(x_{k-1}) + q_{k-1},\,\,\,\,\,\,\, q_{k-1}\sim N(0,Q);\\y_k = H(x_k) + r_k, \,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, r_k \sim N(0,R), \)
em que: \( x_k \) é um vetor de estados de n dimensões em um dado instante de tempo \( k \); \( M \) e \( H \) são mapeamentos não-lineares de \( R^n \) para \( R^n \) e de \( R^m \) para \( R^m \), respectivamente; \( q \) e \( r \) são vetores aleatórios gaussianos de média nula e covariância \( Q \) e \( R \), respectivamente.
Considere a implementação de um Filtro de Kalman por Conjunto (Ensemble Kalman Filter - EnKF) com 1000 pontos representando possíveis estados. Cada um dos 1000 pontos é denotado \( x^{(i)}_t \), onde \( i \) é inteiro e varia de 1 a 1000.
Considere, ainda, que a média dos pontos do conjunto no instante \( k \) pode ser representada por \( \overline{x_k}=\Sigma^{1000}_{i=1}\dfrac{x^{(i)}_k}{1000} \), e que o ganho de Kalman no instante \( k \) é geralmente representado pelo produto de uma matriz \( A \) pela inversa de uma matriz \( B(K_k = AB^{-1}) \).
Considerando as condições enunciadas acima, para garantir estimativas de covariâncias não enviesadas, a matriz \( A \) pode ser calculada pela expressão:
Provas
Um instituto deseja estudar a incidência de certo evento em determinados intervalos de tempo. Seja \( X_1,X_2,...,X_n \) uma amostra aleatória independente e identicamente distribuída conforme uma distribuição de Poisson com parâmetro \( \lambda \).
Sabe-se que \( \lambda \) tem distribuição Gama com parâmetros \( \alpha \) e \( \beta \) e que \( Y=\Sigma_iX_i \). Então, a distribuição a posteriori de \( \lambda \) é
Provas
Um pesquisador usou em seu trabalho para estimar a tendência central de certo fenômeno meteorológico o seguinte estimador:
\( \hat{\theta}=\dfrac{\Sigma^{\eta /2}_{i=1}X_i}{\eta} \)
Sabe-se que o fenômeno em questão segue uma distribuição Normal com média \( \theta \) e desvio-padrão \( \sigma \). O viés do estimador é
Provas
Uma maneira de se mensurar e representar a complexidade de um algoritmo é contabilizar o número de operações de ponto-flutuante (flops) necessárias para executá-lo e utilizar a notação “O-grande”.
Considere o algoritmo a seguir, implementado em uma linguagem de pseudocódigo autoexplicativa.
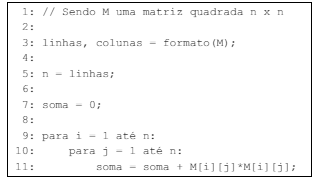
A complexidade desse algoritmo será
Provas
1. Integração do modelo não-linear para frente no tempo.
2. Integração do modelo não-linear para trás no tempo.
3. Integração do modelo adjunto para frente no tempo.
4. Integração do modelo adjunto para trás no tempo.
5. Integração do modelo tangente linear no loop interno.
6. Integração do modelo tangente linear no loop externo.
Assinale a opção que apresenta os processos realizados em assimilação de dados 4DVAR incremental, com restrição forte, na sequência correta de execução.
Provas
Caderno Container