Foram encontradas 609 questões.
(__) Sensores proveem informações dos processos automatizados e do ambiente ao redor deles, convertendo informação física, como pressão, temperatura, nível, em sinais elétricos.
(__) Sistemas de condicionamento de sinais convertem sinais de entrada e saída dos processos para níveis adequados de utilização, executando funções de amplificação ou atenuação, filtragem, conversão analógica-digital e digital-analógica.
(__) Atuadores convertem os dados medidos na saída do processo controlado em ação física, como: válvulas, sistemas de bombeamento, sistemas de frenagem, servomotores.
(__) Controladores tomam as decisões de correção e atuação com base nos seus sinais de entrada provenientes dos sinais dos sensores e das referências.
A sequência correta é
Provas
- Robótica e Automação
- Análise e Controle de Sistemas
- Automação Industrial para Engenharia de Automação
Provas
- Robótica e Automação
- Análise e Controle de Sistemas
- Automação Industrial para Engenharia de Automação
Provas
- Robótica e Automação
- Análise e Controle de Sistemas
- Automação Industrial para Engenharia de Automação
(__) É como um computador pessoal, PC, podendo-se usar sistema operacional baseado em Windows ou Linux, como o Ubuntu.
(__) É equipado com interfaces de entrada e saída especiais para a conexão de sensores e atuadores industriais.
(__) Por ser um dispositivo digital, não é capaz de processar sinais analógicos.
(__) Para controlar processos industriais, o CLP requer um grande número de relés para a realização de comparações e análises lógicas.
(__) Os programas ou softwares de controle gravados em um CLP devem ser regravados no caso de o dispositivo ter permanecido desligado por vários dias.
A sequência correta é
Provas
Observe a seguinte equação.
\(\dfrac{Y(s)}{U(s)} = \dfrac{4}{s^2 + 2s + 4}\)
Para o sistema dinâmico mostrado na equação acima, assinale a alternativa que representa uma realização de estado válida para quando o vetor de estado é definido como: \(x^T = \begin{bmatrix} x_1 & x_2 \end{bmatrix} = \begin{bmatrix} y & \dot{y} \end{bmatrix}.\)
Provas
Com base no diagrama de blocos mostrado na figura a seguir, identifique a função de transferência da entrada de referência r(k) e de perturbação v(k) para a saída y(k).
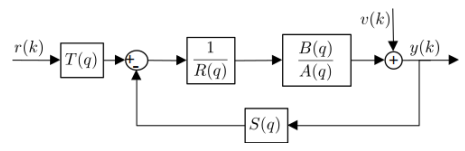
A função de transferência correta é
Provas
O mapa de polos e zeros de um sistema é mostrado na figura a seguir.

Em relação à figura, assinale V (verdadeiro) ou F (falso) nas afirmativas seguintes.
(__) O sistema tem três polos e quatro zeros.
(__) O sistema é instável.
(__) O sistema tem ao menos um polo estável.
(__) O sistema tem quatro zeros de fase não mínima.
A sequência correta é
Provas
Para o sistema dinâmico \( G\left(s\right) \) da equação, determine os ganhos \( k_p,k_i,k_d \) do controlador ProporcionalIntegral-Derivativo (PID), usando a tabela de sintonia baseada nos parâmetros de um modelo de segunda-ordem para quando \( \lambda\ =10. \)
\(G(s) = \dfrac{2}{s^2 + 2s + 4}\)
| Sintonia PID | \(k_p = \dfrac{2\zeta}{k_s \omega_n (\theta + \lambda)}, \quad k_i = \dfrac{k_p \omega_n}{2\zeta}, \quad k_d = \dfrac{k_p}{2\zeta\omega_n}\) |
|---|---|
| Parâmetros do modelo de segunda-ordem. | \(k_s\): ganho estático; \(\omega_n\): frequência natural; \(\zeta\): fator de amortecimento; \(\theta\): atraso ou tempo morto. |
Os ganhos \( k_p,k_i,k_d \) que sintonizam esse controlador PID são:
Provas
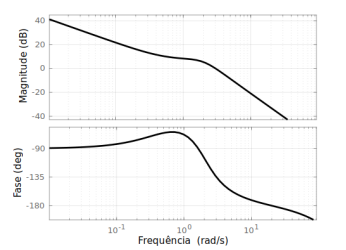
Com base no diagrama da figura, a margem de ganho e a margem de fase são, respectivamente:
Provas
Considere o controlador Proporcional-Integral mostrado a seguir.
\(\dfrac{U(s)}{E(s)} = k_p + k_i \dfrac{1}{s}\)
Operando com um período de amostragem Ts, a síntese digital desse controlador obtida pela aproximação Backward, \(s := \dfrac{1}{T_s} \left( \dfrac{z-1}{z} \right)\) é descrita pela seguinte equação a diferenças no tempo discreto K:
Provas
Caderno Container