Foram encontradas 658 questões.
Leia o seguinte excerto a respeito do conceito Sistemas de Controle de Malha Fechada.
“Os sistemas de controle com realimentação são, com frequência, denominados também sistemas de controle de malha fechada. Em um sistema de controle de malha fechada, o sinal de ______, que é a diferença entre o sinal de entrada e o sinal de realimentação (que pode ser o próprio sinal de saída ou uma função do sinal de saída e suas derivadas e/ou integrais), _______o controlador, de modo a _______o erro e________ a saída do sistema ao valor desejado” (OGATA, 2010)
Assinale a alternativa que preencha correta e respectivamente as lacunas.
Provas
Disciplina: Engenharia Mecatrônica
Banca: ADM&TEC
Orgão: Pref. Rio Largo-AL
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
Provas
Disciplina: Engenharia Mecatrônica
Banca: ADM&TEC
Orgão: Pref. Rio Largo-AL
I. O gozo de férias anuais remuneradas não é um direito dos trabalhadores urbanos e rurais.
II. As condições do mobiliário e dos equipamentos podem estar relacionadas a riscos à saúde e à segurança do trabalhador.
III. Um sistema de automação predial não permite proporcionar conforto e controle personalizado dos sistemas aos usuários da edificação.
Marque a alternativa CORRETA:
Provas
A programação de um controlador lógico programável (CLP) pode ser executada através diversas linguagens conforme os padrões definidos pela IEC 61131-3. Abaixo vemos um trecho de código específico da linguagem Ladder, na qual dois sensores A e B são entradas de sinal, utilizadas para acionar um Motor e um LED:
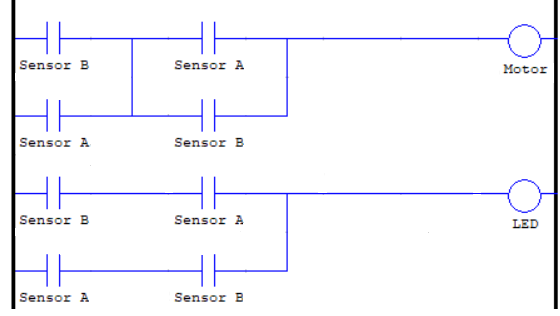
Figura 1: diagrama ladder.
Nesse contexto, considere as seguintes afirmações:
I. O estado do Motor e do LED são iguais independentemente do estado dos sensores A e B.
II. Quando o sensor B está acionado, o Motor estará ligado.
III. Quando o sensor A está acionado e o sensor B desacionado, o LED estará ligado.
Assinale a opção CO RRETA:
Provas
Considere a tabela abaixo que contém manipuladores robóticos articulados de base fixa indicados pelas letras A, B, C e D.
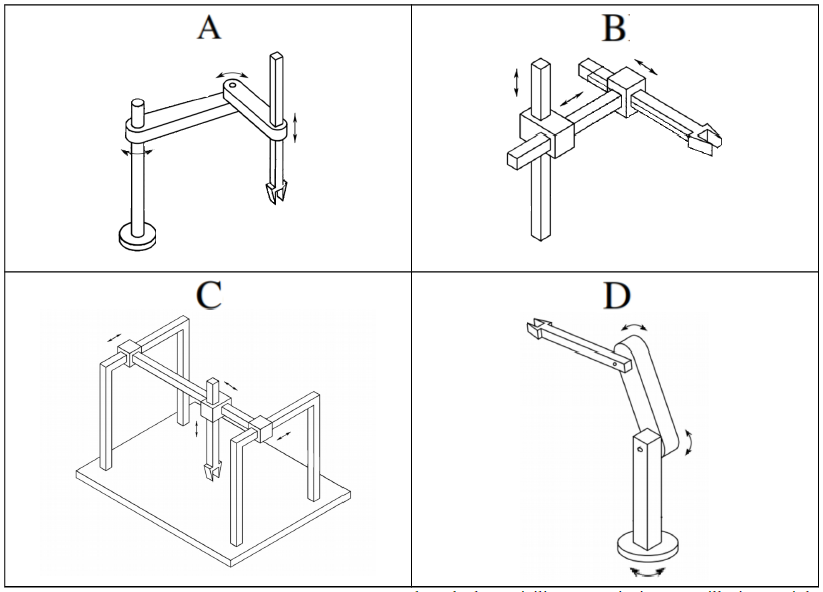
Adaptado de B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo Robotics: modelling, planning and control, advanced textbooks in control and signal processing Springer, London, UK (2009)
Considerando o indicativo das flechas como um grau de liberdade de movimento (rotativo ou linear), são feitas as seguintes afirmações.
I. Os manipuladores B e C possuem o mesmo formato de área de trabalho, ou seja, um paralelepípedo.
II. O manipulador D possui área de trabalho no formato de cilindro
III. O manipulador A possui área de trabalho no formato de cilindro.
Assinale a opção CORRETA:
Provas
Dadas as funções:
I. F(s) = 3/(s+2)
II. G(s) = (s+3)/(s-2)
III. H(s) = (s-2)/(s2+2s+4)
IV. J(s) = 7/(s2+3s+5)
V. M(s) = (5s+1)/(s2-2s+1)
Pode-se dizer que são exemplos de funções de transferência de processos estáveis frente a um sinal de entrada degrau:
Provas
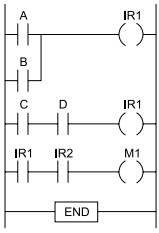
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é
Provas
Um atuador cilíndrico pneumático é utilizado para elevar verticalmente uma carga de 100kN. A área da seção transversal no interior do cilindro é de 0,5 m 2 . Para que o cilindro mova a carga a uma velocidade igual a 0,4m/s, a força aplicada sobre a carga deve ser igual a força peso multiplicada por um fator de correção, fc = 2, relativo a perdas, devido ao atrito, por exemplo. Nesse caso, a pressão no interior do cilindro é
Provas
Um certo motor trifásico é capaz de fornecer 5kW de potência mecânica. Sabe-se que a potência elétrica fornecida ao motor pode ser calculada como P = U x I x 3 1/2 x F.P., onde U é a tensão na rede, I é a corrente elétrica e F.P. é o cosseno do ângulo de defasagem entre U e I. Conforme especificações do fabricante, o motor deve funcionar em U = 380 V, I = 10 A e F.P. = 0,9. Nesse caso, o rendimento do motor é
Provas
Sistemas de controle de velocidade de cruzeiro de um automóvel objetivam manter a velocidade constante independentemente de irregularidades no terreno e variações da direção do vento. Tais sistemas de controle são geralmente complexos. Entretanto, simplificadamente, a relação entre forças e velocidade do veículo é descrita conforme a equação abaixo.
!$ m=\dfrac{dv}{dt}=F-F_0 !$
Sabe-se que !$ v !$ e !$ m !$ são, respectivamente, a velocidade e a massa do automóvel, F é a força aplicada sobre o automóvel pelo sistema de tração, Fo é a força que se opõe ao movimento, devido ao atrito, resistência com o ar, etc, e t é tempo. Se, em um dado instante de tempo, o automóvel está na sua velocidade de cruzeiro constante, a força F estipulada pelo sistema de controle deve ser
Provas
Caderno Container