Foram encontradas 1.245 questões.
|
Projeto |
Investimento |
Redução de custos por ano |
|||
|
Ano 1 |
Ano 2 | Ano 3 |
Ano 4 |
||
|
Sistema de coleta I |
10.000,00 | 2.300,00 | 2.300,00 | 2.300,00 |
2.300,00 |
|
Sistema de coleta II |
12.000,00 | 3.600,00 | 3.600,00 | 3.600,00 |
3.600,00 |
|
Sistema de coleta III |
15.000,00 | 4.500,00 | 4.500,00 | 4.500,00 |
4.500,00 |
|
Sistema de coleta IV |
25.000,00 | 5.100,00 | 5.100,00 | 5.100,00 |
5.100,00 |
Um engenheiro está avaliando duas alternativas para um sistema de coleta de dados de pesquisa. Com base no método do Prazo de Recuperação do Investimento (Payback simples), quais dos projetos são viáveis ?
Provas
Provas
Provas
A transformação IHS é uma técnica de processamento digital de imagens que pode ser aplicada para integrar um conjunto de bandas multiespectrais
Provas
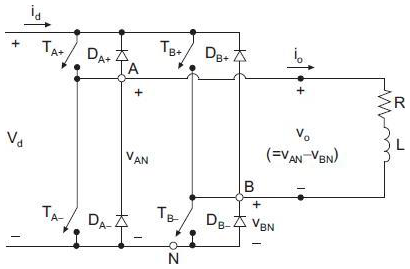
Considere um conversor em ponte ideal, conforme a figura acima. É correto afirmar que
Provas
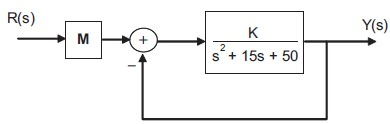
A figura acima apresenta o diagrama em blocos de um sistema de controle em malha fechada. Para que no domínio do tempo a saída y(t) siga a entrada de referência r(t), do tipo degrau, com erro de estado estacionário NULO, a expressão do ganho M será
Provas

A figura acima ilustra um sistema de controle em que uma planta com comportamento instável é estabilizada por meio de um compensador. Os modelos matemáticos da planta e do compensador encontram-se na figura. O compensador apresenta um ganho positivo K que deverá ser ajustado.
Verifica-se que para um determinado valor de K, o sistema em malha fechada apresenta um polo localizado em s = −8 . Este valor é
Provas
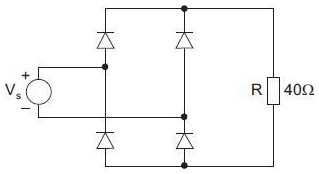
Considere o conversor CA - CC representado na figura acima, alimentado por uma tensão senoidal de valor eficaz de 200V / 60 Hz. A potência, em W, dissipada pela resistência R, é
Provas
Deseja-se controlar o sistema linear, representado pelo modelo em espaço de estado, cujas equações são mostradas a seguir
\( \dot{X}(t)=AX(t)+Bu(t) \) e \( y(t)=CX(t) \)
e o vetor de estado é \( X=\begin{bmatrix} x_1\\x_2 \end{bmatrix} \)
As matrizes são: \( A=\begin{bmatrix} 0&1\\-6&-5 \end{bmatrix} \) B = \( \begin{bmatrix} 0\\1 \end{bmatrix} \) C = \( \begin{bmatrix} 10&0 \end{bmatrix} \)
A estratégia de controle consiste em usar a seguinte realimentação: u(t) = − K X(t), onde K = [k1 k2] e alocar os polos de malha fechada no plano S em s1 = −5 +j5 e s2 = −5 −j5. O valor do vetor de ganhos K é
Provas

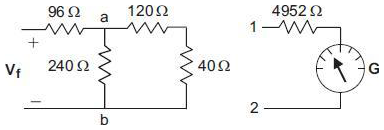
Nos circuitos da figura acima,
Para identificar a tensão ,
O resultado mostrou que o ponteiro de G atingiu 80% do máximo da escala. A tensão ,
Provas
Caderno Container