Foram encontradas 1.192 questões.
Seja um circuito composto por uma associação série de um resistor R, um indutor L e um capacitor C, com as seguintes especificações:
• R = 10 \( \Omega \);
• L = 5 H;
• C = 5 mF.
Sabendo que o circuito é alimentado por uma fonte de tensão alternada com frequência 10/\( \pi \) hertz, a impedância equivalente do circuito, em \( \Omega \), é
Provas
A atenuação por formações meteorológicas possui um papel fundamental no funcionamento de radares meteorológicos. A atenuação do sinal radar por nuvens é devido, em sua maior parte, à concentração de partículas de água e gelo que possuem raios menores do que 100 micrômetros. Para comprimentos de onda maiores do que 0,5 cm, a atenuação é igual a KDM, onde K1 é o coeficiente de atenuação cuja unidade é dB/(km.g/m3) e M é a
concentração de água líquida na nuvem, em g/m3.
A tabela abaixo apresenta valores de K1 para diferentes temperaturas e comprimento de onda do sinal radar.
|
Temperatura (°C) |
Comprimento de onda (cm) |
|||
| 0,9 | 1,24 | 1,8 | 3,2 | |
| 20 | 0,647 | 0,311 | 0,128 |
0,0483 |
| 10 | 0,681 | 0,406 | 0,179 |
0,0630 |
| 0 | 0,99 | 0,532 | 0,267 |
0,0858 |
Com base nos dados apresentados, a atenuação do sinal radar por nuvens é
Provas
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Provas
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Provas
A esfera metálica é um tipo de alvo muito utilizado na calibração de equipamentos de medidas de seção transversal de radar e como elemento básico para a decomposição de alvos complexos. A seção reta radar monostática de duas esferas distantes entre si pode ser representada pela equação a seguir, onde \( l \) é a distância entre duas esferas, \( \lambda \) é o comprimento de onda, \( \theta \) é o ângulo de observação em relação à normal que interliga as duas esferas, \( \sigma_0 \) é a seção transversal monostática de uma esfera metálica e \( \sigma^r \) é a seção transversal monostática das duas esferas espaçadas entre si de \( l \).
\( \dfrac{\sigma_r}{\sigma_o}=2[1+cos(\dfrac{4\pi l}{\lambda}sin \theta)] \)
O gráfico a seguir é a representação polar de \( \dfrac{\sigma_r}{\sigma_o} \) em função do ângulo \( \theta \) de duas esferas de raio 0,5 cm e distantes entre si de 2,5 cm.
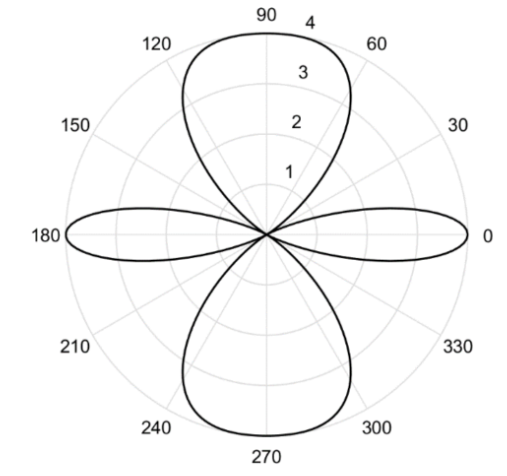
A frequência na qual a curva acima foi obtida, em GHz, é igual a
Provas
A figura abaixo apresenta um indutor com as seguintes características: área de seção transversal do núcleo \( A_N = \dfrac{1}{\pi}\, cm^2 \), comprimento médio do núcleo \( L_N = 20 \, cm \), permeabilidade relativa do núcleo magnético \( \mu_R = 2000 \) e número de espiras \( N = 100 \).
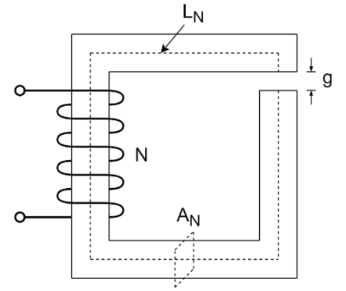
Desprezando os efeitos do fluxo de dispersão e de borda e considerando que \( \mu_0 = 4\pi \cdot 10^{-7}\dfrac{H}{m} \), o comprimento \( g \) do entreferro, para que a indutância desse indutor seja \( 50\, mH \), é de
Provas
Um solenoide com núcleo de ar, de comprimento de \( 20\, cm \), é constituído por 1000 espiras enroladas com diâmetro de \( 2/\pi \) metros.
Considere que \( \mu_0 = 4\pi \cdot 10^{-7}\dfrac{H}{m} \).
A indutância deste solenoide e a taxa de variação de sua corrente para que sua força eletromotriz autoinduzida seja de 24 V, são dadas, respectivamente, por
Provas
Uma das grandes vantagens do controle por realimentação de estados é a de garantir total controle da dinâmica do sistema, permitindo alocar todos os polos do sistema em posições desejadas pelo projetista, desde que o sistema em questão seja controlável.
Considere um sistema dinâmico em malha aberta dado pela seguinte equação:
\( \begin{bmatrix} \dot{x}_1\\ \dot{x}_2 \end{bmatrix}=\begin{bmatrix} -1&4\\1&-1 \end{bmatrix}\begin{bmatrix} x_1\\ x_2 \end{bmatrix}+\begin{bmatrix} 0\\1\end{bmatrix} u \)
em que \( x_1 \), \( x_2 \) são estados e \( u \) a entrada.
Após a inserção de um controlador por realimentação de estados de ganho \( K = [2\,\, 4] \), o sistema em malha fechada passa a ter polos em
Provas
A transformada de Laplace é extensamente utilizada em sistemas de controle, uma vez que os principais métodos clássicos de análise e síntese são realizados no domínio da frequência. Corroborando com essa prática, verifica-se que muitas características da resposta temporal podem ser inferidas diretamente e até mais facilmente no domínio da frequência, sem a necessidade de se computar a transformada inversa de Laplace.
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:
\( Y(s)=L\{y(t)\}=\dfrac{-(s-1)(s+2)(s+3)(s+4)}{s(s+1)^2(s^2+2s+6)} \)
Os valores de \( y(t) \) para \( t=0 \) e \( t \rightarrow \infty \) são, respectivamente,
Provas
Considere um sistema dinâmico, linear e invariante no tempo, de condições iniciais nulas, o qual é submetido a uma entrada forçada. A resposta descrita pelos estados desse sistema depende de três aspectos: do sinal de entrada, da matriz de entrada e da matriz de transição de estados.
Considerando que s é a variável de Laplace, I é a matriz identidade e A é a matriz de estados, a matriz de transição de estados Φ(s) desse sistema é
Provas
Caderno Container