Foram encontradas 769 questões.
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear

Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Disciplina: Engenharia de Automação
Banca: CESGRANRIO
Orgão: Eletronuclear
Provas
Estima-se, atualmente, que mais de 90% das malhas de controle utilizadas em processos industriais operem com controladores proporcional-integral-derivativo (PID). Acerca de controlador PID, julgue os itens a seguir.
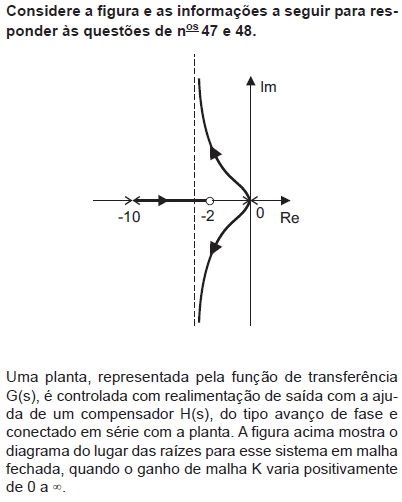
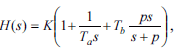 em que K é o ganho do controlador, Ta e Tb são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
em que K é o ganho do controlador, Ta e Tb são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.Provas
Estima-se, atualmente, que mais de 90% das malhas de controle utilizadas em processos industriais operem com controladores proporcional-integral-derivativo (PID). Acerca de controlador PID, julgue os itens a seguir.
O uso de controlador PID é adequado para eliminar erros de regime permanente (ação derivativa), antecipar o comportamento do processo (ação integral) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
Provas
Caderno Container