Foram encontradas 769 questões.
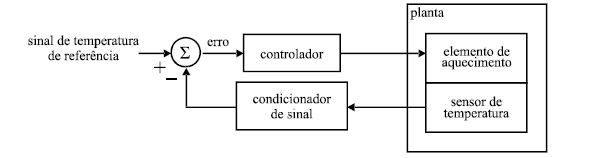
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue os itens a seguir.
Quando o sensor de temperatura termorresistivo é um RTD (resistive temperature detector) de platina, a calibração do sistema não se faz necessária.
Provas
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue os itens a seguir.
Provas
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue os itens a seguir.
Caso a planta esteja localizada em um ambiente industrial susceptível a ruído elétrico, um controlador do tipo PID poderia tornar-se instável devido ao termo derivativo.
Provas
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue os itens a seguir.
O controle de temperatura, quando implementado por um controlador lógico programável (CLP), não permite regulação tipo proporcional integral derivativa (PID) da temperatura.
Provas
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue os itens a seguir.
O sinal de erro em regime permanente pode ser reduzido a zero, caso o controle de temperatura da planta seja realizado por um controlador do tipo proporcional (controlador P).
Provas
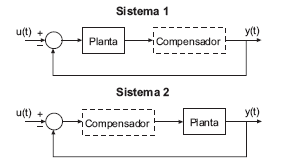
A figura acima ilustra os diagramas de dois sistemas de controle com realimentação unitária. Os modelos matemáticos da planta e do compensador são os mesmos para ambos os sistemas. A diferença entre os dois sistemas está na posição em que o compensador está inserido na malha. Sabe-se que, na planta real, o sinal de entrada corresponde a uma tensão elétrica e o sinal de saída, à velocidade angular de rotação de um eixo. Considere as seguintes afirmativas sobre os sistemas de controle:
I - O diagrama do lugar das raízes (root locus) do sistema 1 é idêntico ao do sistema 2, quando o ganho de malha varia positivamente.
II - A função de transferência em malha fechada do sistema 1 é a mesma do sistema 2.
III - A implementação física do compensador no sistema 1 é distinta daquela para o sistema 2, em função da natureza dos sinais de entrada e de saída da planta.
É(São) correta(s) a(s) afirmativa(s)
Provas
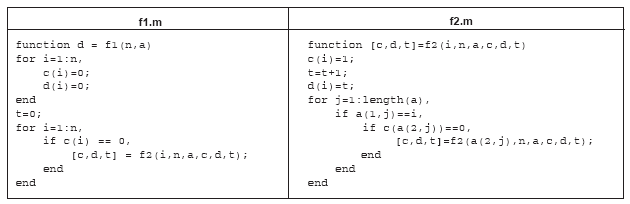
As funções do Matlab f1 e f2 definidas acima implementam um algoritmo de busca depth-first num grafo com n vértices, numerados de 1 até n, e com arestas definidas pelas colunas da matriz a. Ao se executar f1 com entradas n = 5 e a = [1 1 3 3; 3 2 5 4], o vetor d resultante é
Provas
Um sistema de 2a ordem, linear e invariante no tempo, com entrada u(t) e saída y(t), é representado pelo modelo em espaço de estado, com as seguintes equações:
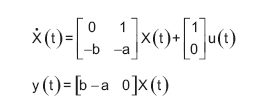
Sabendo-se que os polos desse sistema estão localizados nas seguintes posições do plano ![]() e
e![]() , os valores de a e b, respectivamente, são
, os valores de a e b, respectivamente, são
Provas
Um sistema discreto e causal, tendo x(n) como sinal de entrada e y(n) como sinal de saída, apresenta, como resposta ao impulso, a expressão ![]()
A função de transferência desse sistema é obtida pela transformada Z de h(n), dada pela expressão
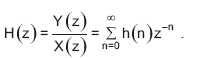
O(s) polo(s) desse sistema no plano complexo Z é(são)
Provas
Considere o modelo de um sistema linear dado pela seguinte representação em espaço de estado:
\( \dot {X} (t) \, = \, \begin {bmatrix} -11 \,\,\,\,\,\,\, -60 \\ 1 \,\,\,\,\,\,\,\,\,\, 5 \end {bmatrix} \, X (t) \, + \, \begin {bmatrix} 1 \\ 0 \end {bmatrix} u (t) \, y(t) \, = \, [1 \,\, 15]X (t) \)
Os polos deste sistema são:
Provas
Caderno Container