Foram encontradas 769 questões.
Sobre automação industrial e controlador lógico programável – CLP, analise as proposições abaixo:
I – Na programação do CLP em diagramas de contatos, as instruções são referentes aos contatos normalmente abertos e fechados, e às bobinas de saída, sendo este diagrama denominado linguagem TAND.
II – As ações básicas dos controladores industriais são ligadesliga, proporcional, proporcional-complementar e proporcional-integral-derivativa.
III –A utilização de realimentação nos sistemas de controle deve ser realizada para reduzir o módulo da função de transferência relativa a variação de parâmetros e perturbações indesejáveis.
Está (ão) correta (s) apenas:
Provas
Sobre sistemas de controle e automação industrial, analise as proposições abaixo:
I – Os sistemas de controle de realimentação não atuam efetivamente em processos industriais com constante de tempo reduzidas.
II – Os sistemas de controle onde a variável controlada muda no tempo são denominados servomecanismos.
III – Os sistemas de controle antecipativos têm aplicação nos processos industriais com fluxos de massa ou energia relativos a variável controlada, que envolvem grandes constantes de tempo.
Está (ão) correta (s) apenas:
Provas
Em sistemas de manufatura, fábricas e usinas, é comum o emprego de controladores lógicos programáveis (CLPs) bem como de dispositivos de suporte, tais como transmissores e supervisórios. Nesse contexto, julgue os itens subseqüentes.
Por meio de sistema supervisório, um operador humano pode acompanhar a evolução das variáveis de um processo bem como ser alertado, por meio de alarmes, da ocorrência de alguma anomalia.
Provas
Com relação a controle de sistemas lineares, julgue os itens seguintes.
Se um dos pólos de um sistema em malha fechada tiver parte imaginária positiva, então o sistema é instável.
Provas
Com relação a controle de sistemas lineares, julgue os itens seguintes.
É denominado em malha aberta o sistema de controle que determina a ação de controle com base em, no mínimo, um elo de realimentação direta ou indireta das saídas.
Provas
O codificador óptico incremental, comumente conhecido por optical incremental encoder, é utilizado principalmente na medição de pequenos deslocamentos angulares de eixos rotativos.
Provas
O transformador diferencial linear variável, comumente conhecido pela sigla inglesa LVDT, tem como principal aplicação a medição de corrente diferencial.
Provas
Na medição de pequenos deslocamentos, podem ser usados sensores capacitivos.
Provas
Com relação a aterramento em instalações elétricas hospitalares, julgue os itens que se seguem.
Em ambientes hospitalares, o aterramento deve favorecer o perfeito funcionamento de equipamentos eletrônicos que devem minimizar interferência elétrica, como, por exemplo, o eletrocardiógrafo.
Provas
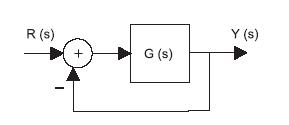
Considere um processo a ser controlado, cujo modelo apresenta a seguinte Função de Transferência:
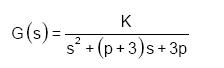
Ao aplicar uma realimentação unitária, conforme a confi- guração mostrada na figura acima, os pólos do sistema em malha fechada serão complexos, conjugados e iguais a -5 ± j 4. Para que isto ocorra, os valores de K e p, respectivamente, devem ser:
Provas
Caderno Container