Foram encontradas 20.445 questões.
Seja uma válvula pneumática comandada por um CLP para controlar a vazão de um fluxo através de uma tubulação, como mostrado na figura 14(a). Seja o comportamento da posição do atuador (y) em resposta ao sinal de comando (x) proveniente do controlador, mostrado pelas curvas da figura 14(b).
Pode-se afirmar:
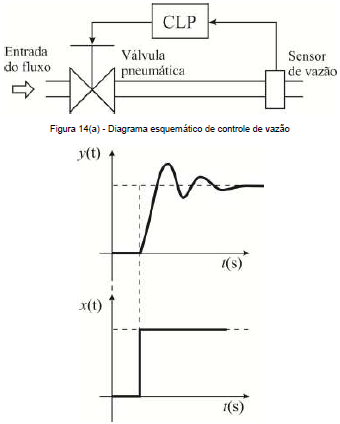
Figura 14(b) - Curvas de resposta e excitação
Com base nessas figuras, analise as afirmativas abaixo.
I. A resposta à excitação do sistema de controle é um sinal sobreamortecido.
II. A resposta à excitação do sistema de controle é um sinal subamortecido.
III. O sinal de excitação proveniente do controlador é um degrau.
IV. A resposta à excitação não produz atraso.
V. O sinal de excitação proveniente do controlador é um impulso.
Estão corretas
Provas
Seja a instalação de dois termopares similares em uma tubulação como mostra a figura 13.
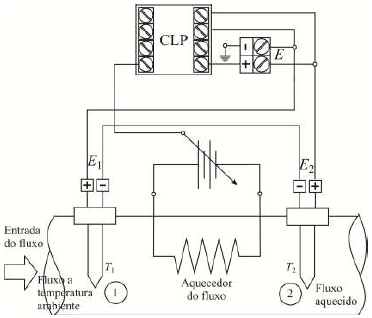
Figura 13 - Arranjo de medição e controle de temperatura
Com base nessa figura, analise as afirmativas abaixo.
I. O arranjo mede indiretamente a diferença de temperatura \( T_2 \, - \, T_1. \)
II. A tensão medida E é a diferença entre \( E_1 \, e \, E_2, \) isto é \( E \, = \, E_1 \, - \, E_2 \)
III. A tensão medida E é a diferença entre \( E_2 \, e \, E_1, \) isto é \( E \, = \, E_2 \, - \, E_1 \)
IV. O arranjo pode ser usado para medir a vazão.
V. As entradas e saídas do controlador são digitais
Estão corretas
Provas
Os sensores de proximidade possuem características distintas como:
I. Detectam pequenos objetos a longa distância.
II. Não são afetados por poeira ou sujeira.
III. Detectam metais e não metais.
IV. Detectam e delineiam superfície.
Essas afirmações são verdadeiras para os seguintes sensores de proximidade, respectivamemente:
Provas
Observe a figura 12 abaixo.
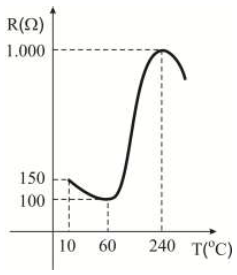
Figura 12 - Curva de um PTC.
Para um sensor de temperatura do tipo PTC, cuja variação da resistência R com a temperatura T é mostrada na figura 12, considere as afirmativas seguintes.
I. A faixa de operação do PTC é entre 60º C até 240ºC.
II. A faixa de operação com coeficiente de temperatura positivo é de 10ºC e 60ºC.
III. A equação que descreve o comportamento linearizadao utilizado para leitura de temperatura usando este PTC é \( R \, = \, 5 \, \cdot \, T \, - \, 200 \)
IV. A equação que descreve o comportamento linearizadao utilizado para leitura de temperatura usando este PTC é \( R \, = \, - \, T \, + \, 160 \)
V. A faixa de operação do PTC é de 10ºC até 240ºC.
Estão corretas
Provas
Quanto às características dos Controladores Lógicos Programáveis (CLP) são, analise as afirmativas seguintes.
I. Empregados na automação industrial.
II. Controlam grandes quantidades de variáveis.
III. O processamento não é feito em tempo real.
IV. Uma das suas linguagens é executada como um diagrama de relés.
V. Possuem memória volátil que precisa ser carregada a partir de um computador ligado a sua porta de comunicação.
VI. Possuem custo mais barato que os relés.
VII. Apesar de serem um dispositivo eletrônico suas saídas podem ser contatos eletromecânicos.
VIII. Possuem pouca flexibilidade para atender mudanças do processo.
Estão corretas
Provas
O circuito de um filtro passa-baixo simples impede que sinais de altas frequências passem. Seja uma fonte de tensão Vs=120Vrms/159MHz alimentando uma carga Rc = 100\( \Omega \) através de um filtro passa-baixo, mostrado na figura 11, que tem o valor de seu capacitor C=1nF.
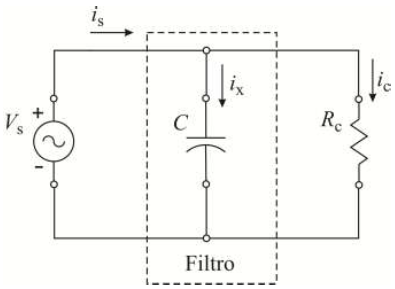
Figura 11 - Circuito com filtro passa-baixo.
Para esse circuito, os valores da corrente na fonte Vs e na carga Rc são, respectivamente,
Provas
Seja um circuito recarregador de bateria representado na figura 9.
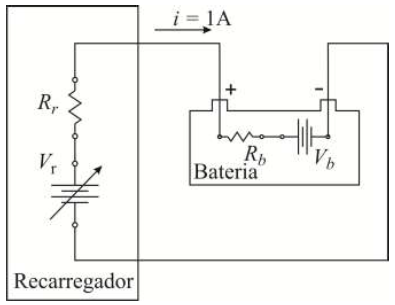
Figura 9 - Diagrama esquemático de um circuito recarregador de bateria.
Considere a bateria com tensão Vb=24V e resistência interna de Rb=0,4\( \Omega \). Seja ainda o recarregador com tensão variável Vr= 0 a 30V com uma resistência interna Rr=0,1\( \Omega \). O valor da tensão Vr inicialmente a ser aplicada pelo recarregador para que a corrente não ultrapasse a 1A é
Provas
Seja um sistema de medição de nível de um reservatório mostrado na figura 4, constituído de uma variável \( \Delta \)R cujo valor é proporcional à altura do nível H. Considere Vs a fonte de alimentação do circuito, R uma resistência fixa e V a tensão lida nos terminais da resistência R.

Figura 4 – Sistema de medição de nível de reservatório.
A equação que permite calcular a altura do nível H a partir do valor lido no voltímetro V é
Provas
Seja um sistema de posicionamento do eixo X de uma mesa de trabalho descrito na figura 3. O elemento sensor é um disco óptico constituído de furos por onde a luz do diodo emissor de luz pode ou não ser recebida pelo receptor, de acordo com estes (diodo emissor de luz e recepctor) estarem ou não alinhados com o furo.
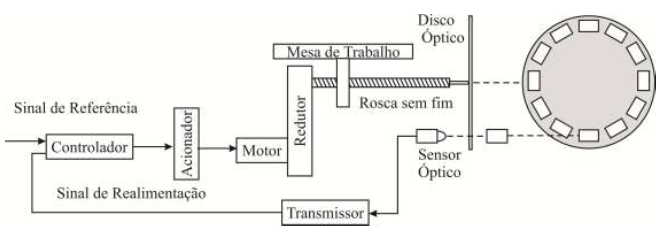
Figura 3 – Representação em diagrama de blocos de um sistema de posicionamento do eixo X de uma mesa de trabalho.
A respeito do controle desse sistema, analise as afirmativas seguintes.
I. Seu controle pode ser realizado mesmo com a perda do sinal de realimentação.
II. O sensor que mede a posição X da mesa de trabalho é um sensor discreto binário que fornece trens de pulso de frequência fixa para o transmissor.
III. O controlador calcula a posição da mesa e compara com o sinal de referência para decidir sua ação.
IV. O redutor é o elemento atuador do sistema de controle.
V. O sensor óptico fornece a informação da posição da mesa.
Estão corretas
Provas
Sistemas modernos são monitorados e controlados com ajuda de computadores digitais. Sistemas variantes no tempo são classificados como analógicos e digitais e estes podem ser observados em um mesmo sistema de controle. Por exemplo, um sistema de controle da posição de um motor elétrico rotativo usa um disco óptico com código Gray para medir sua posição. Nesse caso, o sensor é digital e dispensa uso de conversor para ser lido em um computador que controla a posição do motor de natureza analógica.
A respeito do controle e medição de sistemas variantes no tempo, analise as afirmativas abaixo.
I. Um sistema de controle de malha fechada pode também ser chamado de sistema de controle por realimentação.
II. É necessário transformar sinais analógicos em sinais contínuos para que se possam empregar computadores digitais.
III. Sinal discreto é o mesmo que sinal digital.
IV. O controle por antecipação toma sua decisão baseada no sinal de saída.
V. Os sistemas de controle automatizados não podem ser de malha aberta.
Estão corretas
Provas
Caderno Container