Foram encontradas 485 questões.
- Modelo OSIIntrodução ao Modelo OSI
- Modelo OSIModelo OSI: Camada de Enlace
- Modelo OSIModelo OSI: Camada de Rede
- Modelo OSIModelo OSI: Camada de Transporte
Considere as seguintes afirmações sobre as camadas que compõem o modelo de referência OSI:
I. Cada camada opera em um grau de abstração maior do que as suas camadas inferiores: por exemplo, a camada de transporte opera em um grau de abstração maior que a camada física, a camada de enlace e a camada de rede.
II. A camada de transporte é a responsável pela conexão fim a fim entre origem e destino dos dados. Já em camadas inferiores a ela os protocolos definidos tratam apenas das comunicações entre vizinhos imediatos na rede.
III. A camada de enlace realiza o controle de roteamento dos dados enviados e o controle de congestionamento dos caminhos de transmissão.
IV. A camada de apresentação contém uma série de protocolos comumente necessários para o usuário. Um exemplo de protocolo desta camada é o HTTP (HyperText Transfer Protocol), amplamente utilizado para a World Wide Web.
Assinale a alternativa em que todas as afirmativas estão CORRETAS:
Provas
O método de localização e orientação de um robô móvel apenas a partir de informações de sensores proprioceptivos e IMU, sendo conhecida a posição inicial deste, é denominado:
Provas
Assinale a opção que apresenta os três níveis de programação de robôs:
Provas
Em relação à programação de robôs, assinale a alternativa que contém a afirmativa INCORRETA:
Provas
Embora o controle PID (Proporcional, Integral, Derivativo) seja muito usado em regulação, eles não são adequados para o seguimento de trajetórias, devido às características dinâmicas dos manipuladores, com grande grau de acoplamento e não linearidades. Para viabilizar o uso de PID nesses casos, deve-se empregá-lo como parte de controladores baseados em modelo. Assinale a alternativa que contém apenas técnicas baseadas no modelo dinâmico.
Provas
Considere as afirmativas abaixo sobre singularidades em manipuladores.
I. Em uma configuração singular, o manipulador perde um ou mais graus de liberdade.
II. Próximo a uma singularidade, um pequeno movimento do efetuador final resulta em grandes acelerações nas juntas.
III. Em singularidades, a matriz Jacobiana deixa de ter posto completo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Provas
Os dois problemas inerentes à dinâmica de manipuladores são a dinâmica direta e a dinâmica inversa. As afirmações abaixo correspondem à aplicações de cada tipo de problema. Assinale a alternativa que descreve CORRETAMENTE o tipo de problema na ordem que se apresenta (I, II, III, IV).
I. Implementação de algoritmos de controle do manipulador.
II. Determinação dos torques necessários para gerar o movimento especificado nas juntas, conhecidos os esforços exercidos no efetuador final por contato com o ambiente.
III. Determinação das acelerações causadas pelos esforços no manipulador, uma vez conhecida a configuração inicial deste.
IV. Simulação de sistemas dinâmicos de manipuladores.
Provas
Em relação à redundância cinemática em robôs manipuladores, é INCORRETO afirmar:
Provas
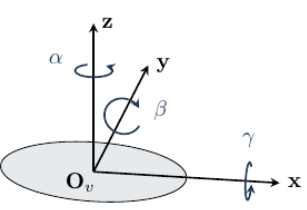
Seja o corpo rígido mostrado abaixo, com um sistema de coordenadas a ele vinculado. Considerando que os ângulos α, β e γ são ângulos de Euler, assinale a alternativa que os nomeia corretamente na ordem α – β – γ
Provas
Em relação às afirmativas abaixo sobre o Jacobiano, em robótica, assinale a alternativa em que todas as afirmativas estão CORRETAS:
I. O Jacobiano expressa o relacionamento entre as velocidades das juntas e a velocidade do efetuador final de um manipulador serial.
II. O Jacobiano relaciona as forças e momentos aplicados no efetuador final aos torques nas juntas do manipulador serial.
III. A matriz Jacobiana de robôs manipuladores só pode ser quadrada ou do contrário o manipulador tem singularidade de representação.
IV. O Jacobiano pode ser usado para determinar numericamente a cinemática inversa de posição.
Provas
Caderno Container