Em aplicações industriais, os end effectors podem variar conforme o objeto a ser
manipulado e o processo a ser executado. Assinale a alternativa que apresenta corretamente as
características e aplicações de garras mecânicas, ventosas a vácuo e end effectors magnéticos.
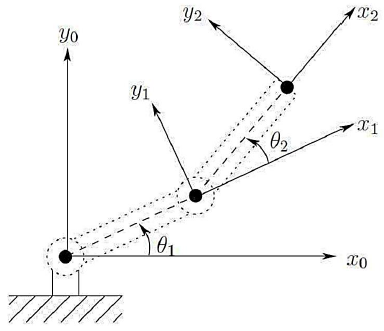
Considere um robô planar composto por dois elos e dois eixos rotacionais, operando no plano XY, conforme o desenho abaixo:
Na representação de Denavit–Hartenberg, os parâmetros para cada link são definidos pelos quatro valores:
ai: comprimento do elo (distância entre os eixos zi e zi+1 medidos ao longo do eixo xi).
\( \alpha_i \): ângulo entre os eixos zi e zi+1 medido em torno de xi.
di: deslocamento ao longo do eixo zi.
\( \theta_i \): ângulo de rotação em torno do eixo zi.
Para um robô planar com dois graus de liberdade, onde os eixos são rotacionais e os elos operam no plano (portanto, sem deslizamento no eixo z), a representação clássica, que apresenta corretamente os parâmetros de Denavit–Hartenberg para esse robô planar, está apresentada na alternativa:
Em um ambiente industrial automatizado, a escolha do tipo de alimentação para
sistemas robotizados depende de diversos fatores, como a aplicação, a carga de trabalho e a
mobilidade necessária. Considerando essas variáveis, assinale a alternativa correta sobre a
alimentação de sistemas robotizados em ambientes industriais automatizados.
Os controladores PID (Proporcional-Integral-Derivativo) são amplamente utilizados
no controle de sistemas dinâmicos para melhorar o desempenho e a estabilidade. Durante o projeto
de um controlador PID, é necessário ajustar os parâmetros KpK_pKp (ganho proporcional),
KiK_iKi (ganho integral) e KdK_dKd (ganho derivativo) de acordo com as características do sistema.
Sendo assim, assinale a alternativa que descreve corretamente o efeito de cada um dos termos do
controlador PID no sistema controlado.
A modelagem matemática de sistemas é uma ferramenta essencial para representar
e analisar fenômenos do mundo real. Esse processo é amplamente utilizado em diversas áreas, como
Engenharia, Física e Economia. Com base nisso, assinale a alternativa que melhor descreve a
modelagem matemática de sistemas.